JG-JQR02 工业机器人基础工作站设备 (ABB机器人系统)
设备概述:
公司经多方调研及深度校企合作研发出系列工业机器人应用与维护实训考核系统设备。该系统符合“四个定位”:即职业技能竞赛的定位;技能培训与鉴定的定位;教学做一体化教学改革的定位;符合高技能人才培训基地的定位;
该设备属于基础技能培训应用设备,以6轴机器人为中心,根据任务要求配置不同任务载体,培养学生对机器人基础知识的认知。任务模型的开发融入了趣味性与娱乐性,可以增加学员的学习兴趣,通过不断的重复训练,强化学员对基本的点示教、直线、曲线等运动足迹的了解与掌握,学习精确点的定位及机器人运动路线选择优化;使学生对机器人应用技术有初步了解与掌握。
该设备任务载体采用模块化设计,具备独立性、兼容性、可移植性等特点;并预留了扩展与升级的接口,根据市场需求进行不断的开发升级或者学校用户自行创新设计新的功能模块。
产品JG-JQR02 工业机器人基础工作站设备 (ABB机器人系统) 参考图片:
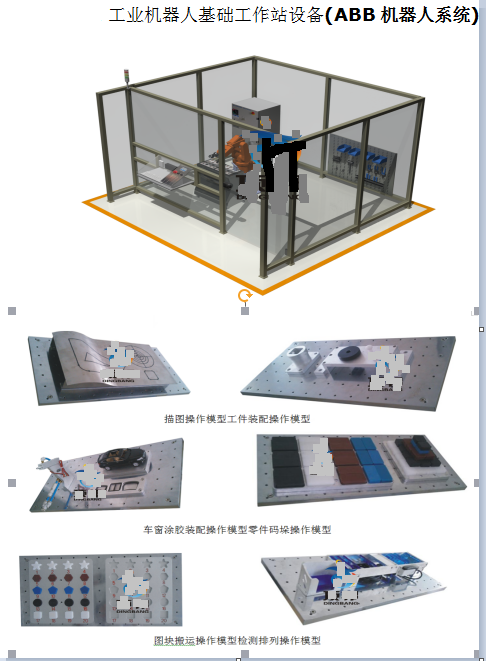
主要功能:JG-JQR02 工业机器人基础工作站设备 (ABB机器人系统)
三、技术参数:
1、 工作电源:单相三线220V±5% 50HZ
安全保护:漏电保护,过流保护,短路保护
2、 额定功率:≤2KW
3、 环境温度:-10~50℃
4、 相对温度:≤85%
5、 外形尺寸:L2300mm×W2800mm×H1200mm
四、产品结构:
该设备主要由六轴工业机器人及底座、实训平台、电气控制板、轨迹训练模型、工件装配模型、检测排列模型、车窗涂胶装配模型、零件码垛模型、图块搬运模型、物料存储箱、工具收纳墙、安全护栏、基础双吸盘夹具、基础绘图笔夹具、基础车窗吸盘夹具、基础抓手吸盘夹具及耗材包组成。
六轴工业机器人及底座:机器人采用实际工业应用的ABB机器人IRB120-3/0.58,有效负载3kg,臂展0.58米,配套工业紧凑型控制器,带机器人控制软件,底座由20mm厚钢板焊接而成,坚固耐用。
视觉系统:工业级专用视觉相机与机器人配套专供、智能黑板相机、能检测物料形状轮廓、配套外置光源等。
实训平台:平台支撑板采用2mm厚钢材经过机械加工折弯成型,表面喷涂处理;台面采用520×266×15mm厚钢板加工而成,表面镀铬处理,间隔40×40mm开M4螺纹通孔,用于安装不同任务模型;并在一侧安装电气接口盒,提供一个急停按钮用于紧急情况下使用,6位按压式端子,使用于任务模型训练的输入/输出接线,方便快捷,一路气路输出口及气压调节控制,可对训练提供需要的气源。
电气控制板:操作面采用透明有机玻璃,利用操作与观察,并有350×400mm的区域用于资料与书籍摆放的人性化设计;面板右侧不锈钢板蚀刻处理,安装有断路器用于对设备电源的控制,急停按钮可应急紧急情况的发生,转换开关可对手动与自动之间切换,电源按钮可控制设备启停电路,16个钮子开关用于手动状态对机器人IO输入的控制,16个LED指示灯显示机器人运行状态;背面网孔板不锈钢把加工而成,用于安装继电器、开关电源等电器元件;整个控制板系统通过钢架结构安装在安全护栏的框架上,离地高度1米左右,符合身体操作。
轨迹训练模型:不锈钢加工制造,通过在平面、曲面上蚀刻不同图形规则的图案(直线、圆形、三角形、五角星螺旋形等线条),以笔形绘图夹具描绘图形,训练对机器人基本的点示教,直线、曲线运动足迹的掌握;
工件装配模型:以一个固定在操作台工件为“主体工件”;机器人通过抓手或吸盘拾取“装配工件”并把“装配工件”精确装配到“主体工件”内;而后机器人通过抓手或吸盘拾取“穿销工件”并把“穿销工件”从上至下穿入“主体工件”和“装配工件”;或从侧面穿入“主体工件”和“装配工件”内;“装配工件”装配到“主体工件”采用从上而下装配,“穿销工件”装配有两种方式,可以从上至下,也可以从侧面穿入;训练对机器人精确定位及抓手吸盘夹具的学习。
检测排列模型:车窗玻璃板原始存放在存储仓内,玻璃板采用梯形设计,摆放装置采用长边插入,分为左右两个方向,检测台有光纤传感器检测玻璃板的长边;机器人通过吸盘夹具拾取玻璃板到检测台检测,根据检测判断玻璃长边选择插入方向;依次循环; 吸盘夹具依次拾取汽车车窗玻璃板;训练对机器人有不同结果选择的精确定位应用技能
车窗涂胶装配模型:涂胶机、汽车模型、车窗工件板分别固定到操作台上;机器人通过吸盘夹具拾取车窗工件板上汽车车窗;并对拾取车窗进行涂胶,完成后把车窗装配到汽车上;而后拾取第二块车窗,依次完成前窗、天窗、后窗的拾取、涂胶、装配任务;练习对机器人点的示教、机器人运动轨迹选择及与涂胶机的配合。
零件码垛模型:铝材加工氧化的物料摆放底板和码垛底板固定到操作台;根据要求物料块被摆放到摆放底板上,机器人通过吸盘夹具按要求拾取物料块进行码垛任务; 物料块有长方形和正方形两种,操作者可根据需要选择摆放;可根据需要自由组合码垛出多种形状; 练习对机器人码垛、阵列的理解并快速编程示教的应用技能。
图块搬运模型:多形状物料搬运:机器人通过吸盘夹具依次把一个物料板摆放好的多种形状物料(方形、圆形、五边形、六边形、五角星)拾取搬运到另一个物料板上;圆形物料搬运:机器人通过吸盘夹具依次把一个物料板摆放好的物料拾取搬运到另一个物料板上;物料板可以水平固定到操作台,也可倾斜一点角度安装到操作台;圆形物料有两种,一种金属钱币形物料,一种单面锥形物料;每个物料板对应工位都蚀刻有物料编号;搬运形式可根据要求灵活组合,形式多样,能满足平面、斜面、阵列、指定编号位置、多种物料混合等要求;强化对机器人点位示教技能移训练。
物料存储箱:尺寸:700 mm×350 mm×450mm;内部分层存储器件,每层有独立拉手及支撑柱;最多可放3层,内衬采用海棉材料;外壳和内层板均采用ABS材料,模具一次成形;各箱子之间可层叠并方便扣锁连成一体;隔层板每层承重20kg,整个箱体内置可承60kg,箱体外部可承130kg。
工具收纳墙:2.0mm优质厚钢网板制作而成,能固定于墙体上;有10多个工具位置,每个工具位置带有定制目视化管理标识,用于存放各种工具及螺丝螺母等零件,形象直观,存放方便,利于搬运,占用空间小,是工具零件存储保管的理想载体。
安全护栏:隔离护栏,高1000mm,框架采用2mm厚灰色栋梁铝合金型材,钢化玻璃10mm厚;工作站全部通透利于观察,玻璃中间没有隔断;并安装一个侧开门;门上安装安全检测元件,机器人自动运行必须在门关闭状态下进行;系统工作站安装有3个急停按钮,分别位于操作控制台、模型安装台、隔离护栏上,以备紧急情况使用。
基础绘图笔夹具:铝材加工氧化处理,笔杆内空,可装入笔芯进行绘制。
基础双吸盘夹具:铝材加工氧化处理,能满足玻璃板、物料块(圆形、方形、五角星、五边形、六边形、)、半球形、长条形物料等多种物料的拾取,做到多个任务夹具通用。
基础车窗吸盘夹具:铝材加工氧化处理,能满足汽车模型玻璃窗、玻璃板、物料块(圆形、方形、五角星、五边形、六边形、)、半球形物料等多种物料的拾取,做到多个任务夹具通用。
基础抓手吸盘夹具:铝材加工氧化处理,集成抓手与吸盘两种功能,能对多种物料进行处理,学员可根据要求选择一种方式或两种方式同时使用,满足教学多样性及自主选择性。
五、产品特点:
1. 开放式设计:可根据实训内容选择机器人使用夹具及载体模型;并根据学员意愿选择在实训平台的安装位置及方向;且具有很好的延伸型,客户可根据自己的需求开发新模型及夹具。
2. 模具化运用:所有模型及夹具全部装入一次开模制作的物料存储箱内,使用保存方便快捷,节约空间,便于管理。
六、可开设的主要实训项目
1、工业机器人的基本认识。
2、工业机器人示教器运动操作。
3、工业机器人的点位示教。
4、工业机器人基本参数设置。
5、工业机器人基本运动指示学习。
6、工业机器人基于示教器的程序编辑。
7、工业机器人IO控制应用。
8、工业机器人基本接线方法。
9、简单轨迹运行编程与示教。
10、平面圆形描图任务编程与示教。
11、平面矩形描图任务编程与示教。
12、曲面圆形描图任务编程与示教。
13、曲面矩形描图任务编程与示教。
14、固定位置搬运编程与示教。
15、平面位置搬运装配编程与示教 。
16、斜面位置搬运装配编程与示教 。
17、平面矩阵立体码垛编程与示教。
18、模型车窗涂胶装配编程与示教。
19、汽车玻璃检测与分类排列的编程与示教。
20、固定位置搬运编程与示教;
21、玻璃板检测与分类排列的编程与示教;
22、工业机器人与抓手夹具配合是应用;
23、工业机器人与吸盘夹具配合是应用;

|