JGLS-M01 型 工业机器人理实一体化实训系统

JGLS-M01 工业机器人理实一体化实训系统是针对工业机器人编程教学的一款理实一体化的实训设备,具有成本低,安全性高优势。该产品能够通过实物示教器进行示教编程、运行操作 PC 上的虚拟机器人进行运动控制,且运动过程中没有噪音。当教师从理论上讲解之后,学生就可以动手操作机器人,能够激发学生对机器人课堂学习的兴趣,提高学生和老师之间的互动性。
系统用真实的示教器和真实的控制器控制模拟软件上的虚拟机器人,模仿真实的机器人运动。省去伺服驱动、减速器、电机、机器人本体,节省成本。对于教学产品来说,安全性是很重要的,由于没有使用实际的机器人本体,所以不存在安全隐患。
• 技术参数
1 、规格: 700mm × 600mm × 1200mm
2 、 额定电压: 220V 50Hz
3 、额定功率: 120W
4 、额定电流: 10A
5 、最大控制轴数: 6 轴
6 、控制模式:自动 / 手动控制
7 、适用环境:温度 -20 °- 45 °、湿度 20% - 80%
二、功能介绍
1 、工业机器人示教器的编程功能;
2 、实现了计算机和底层硬件的以太网通讯;
3 、实现了计算机对底层硬件的数据读取,以及计算机对底层硬件数据的写入;
4 、机器人模型显示功能;
5 、实时数据的显示;
6 、动态添加机器人模型;
7 、重启控制器功能;
8 、机器人模型以不同方式显示;
9 、可以动态添加机器人模型并显示;
10 、该软件可以用真实示教器模拟虚拟机器人的运动;
11 、 机器人数据实时显示。
三、硬件组成及功能
系统由实训台、示教器、计算机、控制器、远程 IO 模块等组成。其中示教器、计算机、控制器都是通过路由器互相通信。示教器通过路由器给控制器发送命令,控制器通过该命令控制 PC 上的虚拟机器人。
• 实训台:

实训台整体采用琴式设计,选用 1mm 厚钢板制作,表面经环保喷塑处理,整体规格: 700mm × 600mm × 1200mm ,背面大开门设计,方便计算机、显示器、控制器的安装接线。正面设有键盘、鼠标位置。
2 、示教器:

(1) 采用 TI Cortex-A8 32 位高性能工业控制处理器,在图形处理、工业以太网和灵活外设等方面具有非常突出的优势。
(2) 专业的人机工程学设计,结构美观,整体布局和设计充分考虑了人性化,为用户提供良好的操作体验;
(3) 按键、指示灯可扩展性好,方便用户自定义;
(4) 方便地实现对机器人的手动操作、示教编程、机器人运行等人机对话功能。 8inch TFT 大屏幕,提供丰富、清晰的人机交互窗口,提升产品档次;
(5) 完全自主知识产权设计,软硬件平台成熟、稳定;
(6) 功能部件齐全,使能开关、触摸笔等可选配,可以完全满足不同用户的应用需求。
(7) 整机工业级设计,高可靠性。
3 、控制器: 处理器 :X86 、 4 核、 2G ;内存 :2G ;存储空间 32G;
4 、控制轴数 : 标准 :6 轴垂直关节机器人可选配 :1 轴地轨 2 轴辅助轴变位机 3 轴龙门架;
5 、控制伺服: EtherCAT .CANopen;
6 、远程 IO 通信模块:数字 1/0 接口 16 路输入 /16 位输出 ( 可扩展 )4 路 -10~+10v 模拟量输出 12 位精度 ( 选配可扩展 )8 路 -5~+5 或 0-10v 模拟量采集 12 位精度 ( 选配 , 可扩展 ) 机器人专用端子接口 , 防碰撞、电机报间、报警控制等
7 、电源模块: 24V , 60W( 控制器功率 30W ,示教盒 30W) ;
• 软件功能
软件系统分为四个模块:通信模块,机器人模型导入模块,外部运动控制模块,数据显示模块。其中通信模块包括设备扫描,建立连接以及断开连接;机器人模型导入模块包括是确定机器人机械坐标系、 DH 参数设置、检查是否有对应的机器人模型数据;外部运动控制模块指的是利用示教器控制虚拟机器人运动,包括外部启动和外部停止;数据显示模块包括设备信息显示、关节坐标显示、笛卡尔坐标显示以及机器人模型显示。
1 、操作模式:示教模式、再现模式、远程模式;
2 、编程方式:示教编程、离线编程、拖动示教;
3 、运动功能:点到点、直线、圆弧、样条曲线、直线横摆、 FLYBY ;
4 、指令系统:运动指令、逻辑指令、输入输出指令、运算指令;
5 、位置控制方式:点到点控制、连续轨迹控制
6 、坐标系统:关节坐标系、机器人坐标系、工具坐标系、用户坐标系;
7 、结构算法: 4 轴 SCARA4 轴冲压机械手 6 轴垂直多关节、 4 轴连杆码垛 4 轴直角坐标机器人、定制化专用机器人;
8 、应用场景:装配、点胶、焊接、喷涂、码垛、切割、抛光打磨、搬运等。
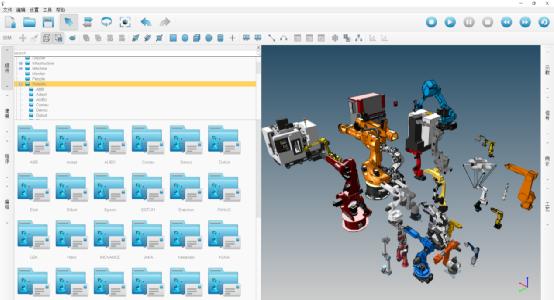
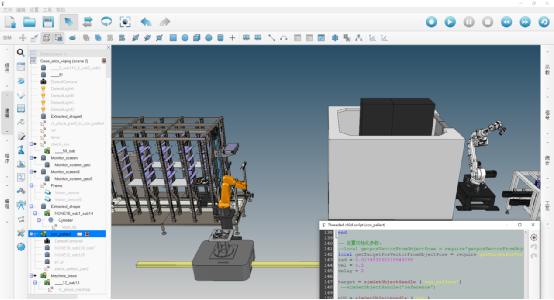
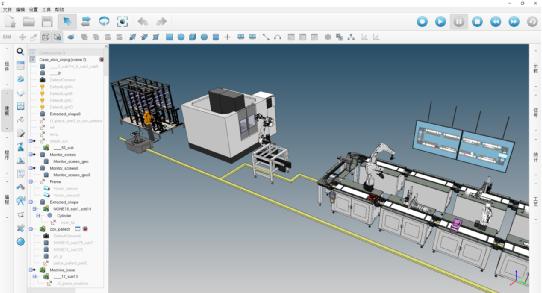
机器人离线编程教学软件
( 1 )仿真系统支持 50 种以上的各品 牌机器人模型和大量生产线组件库;
( 2 )支持多种格式的三维 CAD 模型,可导入扩展名为 step 、 igs 、 stl 等格式;
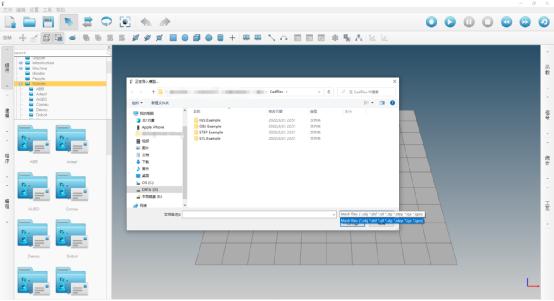
( 3 )可通过导入 CAD 模型快速生成运动组件,并对组件特征树进行操作和修改 ;
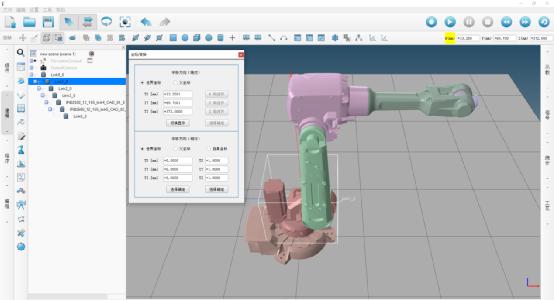
( 4 )支持关节型机器人、 Delta (空间三自由度并联机构机器人)、(平面关节型机器人)、直角坐标等各种结构的机器人;
( 5 )允许通过专用的模板和程序语言定制各种机器人和自动化工具的运动控制。算法支持包含 3-5 轴的通用机床、 3-6 个旋转轴的串联,并联,双臂, AGV 小车,等机器人及生产线上对应的工装夹具,传送带,变位机,导轨等辅助设备;
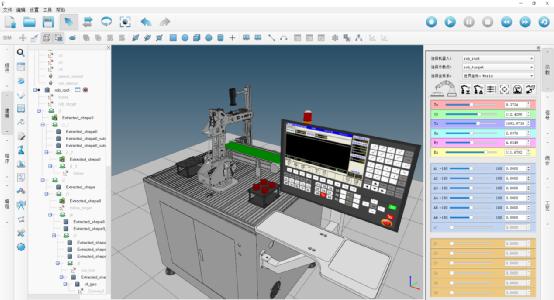
( 6 )提供工业机器人虚拟教学模块,能够通过虚拟示教器对机器人的手动操作以及程序代码的自动运行,也能直连客户指 定的实际示教器;
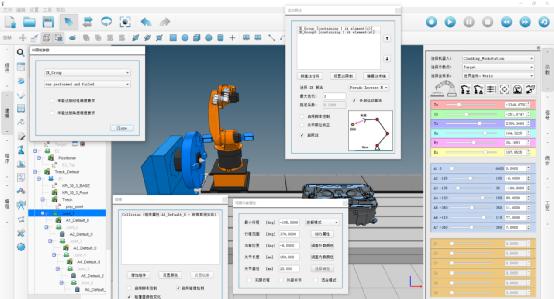
( 7 )提供强大的 API 功能支持,允许开展大量机器人机构的自动化应用。可进行仿真和应用于程序机器人取放物体和应用于复杂的多机器人同步运动等;
( 8 )包含丰富的轨迹调整优化工具包,如碰撞检查、工业机器人可达性、姿态奇异点、轴超限等;
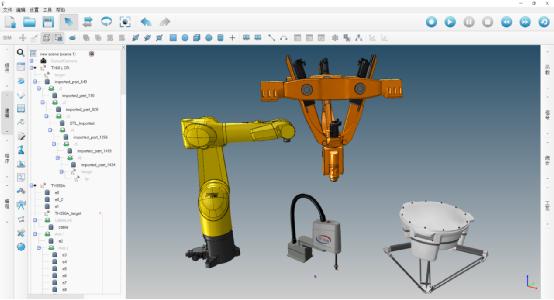
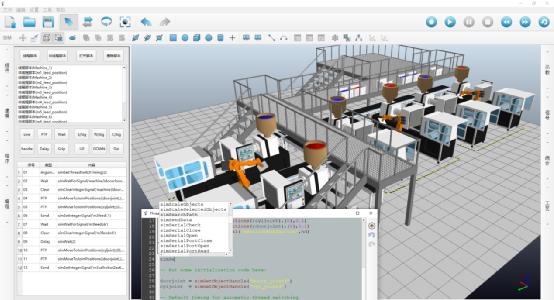
( 9 )支持多机器人同步运动仿真,能够实现 5 个及以上机器人与外部轴的同步运动;

( 10 )具有自动化生产线仿真功能,包含码垛机、 AGV 小车、串联机器人在内的功能模块;
( 11 )真实的模拟效果(如焊接火花效果、喷漆上色效果、雕刻效果);
( 12 )提供多视角的观察,并可实现运动视角镜头追踪;
( 13 )支持虚拟传感器的建模与仿真,支持视觉,激光距离,力传感等传感器的仿真,效果接近真实传感器的效果;
( 14 )场景中的物理实体具有真实世界中的物体的物理效果,可以进行碰撞检测并具备刚体运动的效果,具备设置重力,摩擦系数等参数能力,并能根据这些参数模拟物体的真实运动效果,用户可以按照真实世界中的逻辑对场景进行建模,减少了建模的复杂性。
( 15 )具有离线编程功能。
( 16 )可生成仿真运动视频( AVI 或者 Mp4 格式)并导出。
|
