JG-IRB01�� ��ҵ�����˲�������άʵѵƽ̨
һ���������
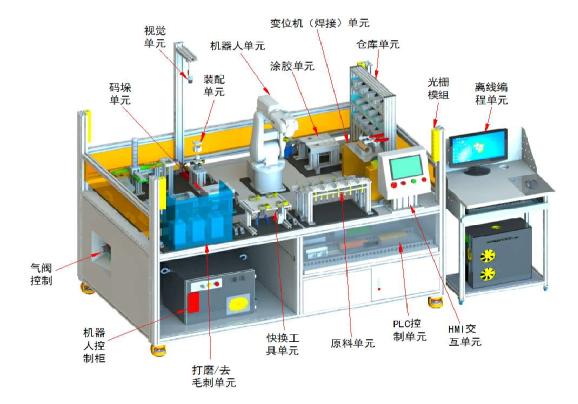
1�����豸�ǹ�ҵ������רҵ��ѧѵ���ۺ�ʵѵ�豸����ģ�黯����˼·����Ҫ���������˵�Ԫ��װ�䵥Ԫ���Ӿ���Ԫ���˶��켣��Ԫ����ⵥԪ���컻���ߵ�Ԫ����ĥ��Ԫ�����ӵ�Ԫ��ȥë�̵�Ԫ���ֿⵥԪ���˻�������Ԫ��PLC ��Ԫ�����߱�̵�Ԫ������ƽ̨��Ԫ�Լ����õȡ�����ѵ�����������ɿ��ٸ�����ͬģ�飬ʵ�ֲ�ͬ�ѶȲ�ͬ���ܵ�Ŀ��ˡ�ϵͳ��ȼ��������߱�̼�����������������Ӳ��ƽ̨����άģ����Դ����������Ϳ������ĥ�����ӡ����ȹ���ʵ�ֵı�̹��̡���߹켣���־��ȡ����ⷢ����ײ���档�ù���վ����������ְҵԺУ��ͬרҵѧ����Թ�ҵ�����˵IJ����ͱ�̵Ľ�ѧ��������Դ�ڹ�ҵ������Ҳʹ�����������Ϊѵ��ƽ̨��ƽ̨չʾ�˹�ҵ�Զ����������졢�������ֻ����������绯��ϵͳ���ɻ���˼�룬�漰���ܿ��Ƽ�������ҵ�����˼���������һ�廯�����������Ӧ�ü���������������������������������֪ʶ�ͼ��ܡ�
2�����豸�������м����������ϵĸ����˲��ڹ�ҵ���������רҵ����Ӧ�÷������ѵ�γ̵Ľ�ѧ��ѵ������ʵ���������ӵ����(����)���ۺϼ��������ܣ���ѵ������ѧ������������ǿ����Ϊ����ڹ�����λ�������ļ��������ṩ�н����ԵĽ��������
����ϵͳ�ص�
1��ͻ���ߣ��߶�ְҵ���ܣ����£�����ְҵ���ܣ������������ڼ��ܿ�������ǰ��ǰհ�Լ��ܿ�������
2�����Կز�Ʒ�ṹ�ϰ�������Ʒ�Ʋ�Ʒ��
3. ģ�黯��ƣ�ʵѵ���ܿ���ѧԱ�������䣻
4. PLC�������ϵͳ���ʹ�ã�ʵ���������̵�Э��������
������������
1. ������Դ������ AC 220V��10% 50 Hz��
2. �¶ȣ�-10��40 �棻����ʪ�ȣ���90%��25�棩��
3. �������ģ���1.5 kW��
4. ��ȫ������ʩ�����нӵر�����©�籣�����ܣ���ȫ�Է�����صĹ��ұ������ø߾�Ե�İ�ȫ�Ͳ���������Ե���ĸ�ǿ�Ȱ�ȫ��ʵ�鵼��
5�����γߴ� �����ߣ�2100*1200*1400mm��
�ġ�ʵѵ���ݣ�
1.��ҵ�����˰�װ����ʼ���뱸�ݻָ�������Ŀ
2.��ҵ�������ֶ����Ƽ�������������
3.��ҵ������ IOͨ�ż�����ͨ��
4.��ҵ�����˵����˶��������˶�����
5.��ҵ�����˹��� TCP�����궨
6.��ҵ�����˹�������ϵ�����궨��������ϵ�л�
7.��ҵ�����˶������߿��ٸ���
8.��ƽ��켣�����ӿռ�켣���
9.��ҵ�����˴�ĥ����Ӧ�ÿ�����Ŀ
10.��ҵ�����˺��ӹ���Ӧ�ÿ�����Ŀ
11.��ҵ������ȥë�̹���Ӧ�ÿ�����Ŀ
12.��ҵ���������λ�������˶����ƿ�����Ŀ
13.�Ӿ����������İ�װ��ͨѶ���⿼����Ŀ
14.��ҵ�����˿컻���ߵļ���ѡ����Ӧ�ÿ�����Ŀ
15.CCD������Դ����ɺ���ԭ��������Ŀ
16.��ҵ�Ӿ���ɫʶ�𡢳ߴ�ʶ����״ʶ����ʵ�ٿ�����Ŀ
17.��ҵ�������� CCD�Ӿ�ϵͳ����ͨѶӦ�ÿ�����Ŀ
18.RIFDʶ��ּ�Ӧ������Կ�����Ŀ
19.ϵͳ��Ԫ HMI�����������������Կ�����Ŀ
20.��̬�����İ�װ��ͨ�����ÿ�����Ŀ
21.PLC�����������Կ�����Ŀ
22.PLC�빤ҵ����������ͨѶӦ�ÿ�����Ŀ
23.PLC�ŷ�����ٶ�λ�ÿ��ƹ��ܵ�Ӧ�ÿ�����Ŀ
24.PLC������ϵ��������ų�������Ŀ
25.PLC������ϵ��������ų�������Ŀ��
26.ϵͳ�������ϵ������ų����������߹��ϵ������ų�������Ŀ
27.�������źŹ��ϵ������ų��ȿ�����Ŀ
�塢ģ�����ã�
��� |
ģ�鵥Ԫ |
���� |
��λ |
��ע |
1 |
�����˵�Ԫ |
1 |
�� |
ABB1200 |
2 |
װ�䵥Ԫ |
1 |
�� |
|
3 |
ԭ�ϵ�Ԫ |
1 |
�� |
|
4 |
�켣�˶���Ԫ |
1 |
�� |
|
5 |
�ֿⵥԪ |
1 |
�� |
|
6 |
�Ӿ���Ԫ |
1 |
�� |
|
7 |
��ⵥԪ |
1 |
�� |
|
8 |
�컻���ߵ�Ԫ |
1 |
�� |
|
9 |
��ĥ��Ԫ / ȥë�̵�Ԫ |
1 |
�� |
|
10 |
���ӵ�Ԫ |
1 |
�� |
|
11 |
RIFD ʶ��Ԫ |
1 |
�� |
|
12 |
��̵�Ԫ |
1 |
�� |
|
13 |
HMI ������Ԫ |
1 |
�� |
|
14 |
PLC ���Ƶ�Ԫ |
1 |
�� |
|
15 |
���õ�Ԫ |
|
|
|
16 |
������ʵ���Ұ�ȫ����ϵͳ |
1 |
�� |
|
�����豸��ģ����Ҫ��������
��� |
���� |
������ |
���� |
��λ |
1 |
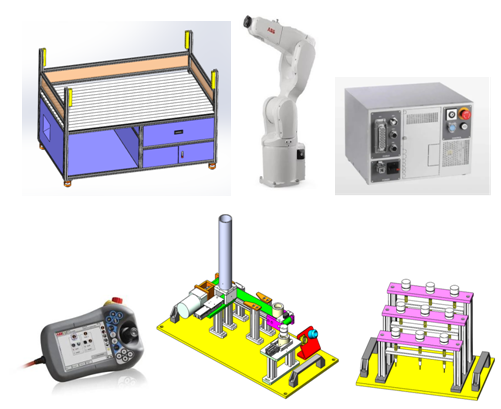
������ ( ����ƽ̨��Ԫ ) |
1 ���R 1800mm �� 1200mm �� 800mm ��ҵ���ͲĴ���ӽ�������ܴ��� , �����֡��ű���
2 ����ɫ������ 1 ��
3 ����������ˮ������ AFC-2000 1 ��
4 �������˹̶��� |
1 |
̨ |
2 |
�����˵�Ԫ |
�� 1 �� IRB 1200-5/0.9 ����
������ 6
���أ� 5kg
�������� 900mm
�ظ���λ���ȣ� 0.025mm
�����ȼ����䣺 IP40
�����ȼ�ѡ�䣺 IP67
��װ��ʽ������Ƕ�
���������� 54kg
�ܺģ� 0.38kw
�� 2 �������� IRC5 ������
��Դ���룺 200V/230V 50-60Hz
�ߴ磺 710*449*442mm
������ 30kg
�����ȼ��� IP20
�� 3 �� FlexPendant ʾ����
������ 1kg
֧�֣���ɫ�����������ݸˣ�����ͣ��֧�ֹ����� / �����л���֧�� U �̡��Ȳ�Ρ��ָ�����֧�� USB ����������ʱ���ǵ�¼��֧��Զ�̷��� |
1 |
�� |
3 |
װ�䵥Ԫ |
���ܣ��ɾ�ʽ����ģ�顢���ʹ�ģ�顢װ��̶�ģ����ɣ����ÿ��ƶ� / �̶�ʽ�װ塣������������ģ���ͳ������ʹ�������ĩ���ɻ����˼�ȡ������װ��̶������Ͻ���װ���������ʵ�����ϡ���⡢���䡢���ˡ�װ���ʵѵ������
��ʽ����ģ����˫������ 1 ֻ����ŷ� 1 �����ſ��� 1 �������˴����� 1 �������ñ���װ������
���ʹ�ģ���������첽��� 1 ����ĩ�˸�Ӧ�����������ʹ������ð�װ������ɡ�
װ��̶�ģ����ָ������ 1 ֻ����ŷ� 1 �����ſ��� 1 ������װ֧����ɣ��������ӿڡ� |
1 |
�� |
4 |
ԭ�ϵ�Ԫ |
���ܣ�����װ�乤�����ɻ����˽��˹���ԭ�ϰ�����װ��̶�ģ���Ͻ���װ�������
M12 Բ���δ����� 9 ֻ�����ñ���װ�������ƶ�ʽ�װ壬�������ӿڡ� |
1 |
�� |
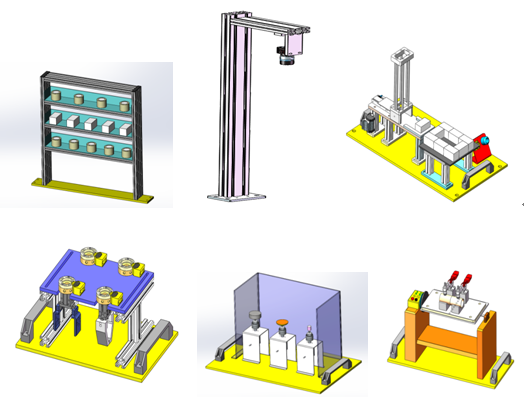
5 |
�켣�˶���Ԫ |
���ܣ���ʵ�� TCP �궨������ϵ��������ͬ��״�켣��ʾ�̱�̺����߱�̡�
Ϳ��ģ���ǽ���ҵ�����˶Բ�Ʒװ��ǰ��Ϳ�����ս��й��ܳ�����ҵ������ץ��Ϳ��������Ϳ������ϲ�ͬ�����켣�˶���ģ��Ϳ�����գ���֤������ʵ��ͬʱ���ӽ�ѧ�����Ժ�Ȥζ�ԡ�
��Ҫ�ɹ켣�塢��װ֧�ܡ��ƶ�ʽ�װ���ɡ� |
1 |
�� |
6 |
�ֿⵥԪ |
���ܣ�����ʽ�ֿ�ģ���Ϊ���ģ�顢װ��ģ���Ʒ����������ģ�鹤���ṩ���ÿռ䡣
��Ҫ���ƶ�ʽ�װ壬��װ֧�ܵ���ɡ� |
1 |
�� |
7 |
�Ӿ���Ԫ |
���ܣ���ϻ����˶Թ������з�������⡢��λ�ȣ����źŴ���������ָʾ��һ��������
�Ӿ�ϵϵͳ���ù�ҵ CCD ��� 130 �����أ���ҵ��ͷ�� LED ��Դ��
�ɶ�����λ�á���ɫ��覴á��ߵ����Ϣ���м��
�ͻ���������ͨѶ��ע������ϵͳҪ�߱�������ͨѶ���ܣ�������߱������ IO ͨѶ���� |
1 |
�� |
8 |
��ⵥԪ |
���ܣ��ɷ��ξ�ʽ���ϻ�������������ɣ����������ϻ����ͳ��������˽��������˵��������Ͻ�����������
��˫������ 1 ֻ����ŷ� 1 �����ſ��� 1 �������˴����� 2 ���������ñ���װ�������ƶ�ʽ�װ壬�������ӿڡ� |
1 |
�� |
9 |
�컻���ߵ�Ԫ |
���ܣ��� 4 �ּо���ɣ���ϻ�����ʹ�������ˡ�Ϳ�������ӡ�������;��
���ÿ컻��ͷ 1 �����컻ĸͷ 4 �������˼о� 2 �ס�Ϳ���о� 1 �ס����ӹ��� 1 �ס���ŷ� 3 ���������̶��������ƶ�ʽ�װ塣 |
1 |
�� |
10 |
��ĥ��Ԫ / ȥë�̵�Ԫ |
���ܣ������˼�ȡ����������Ԫ���д�ĥ��ȥë�̲�����ͬʱ�䱸����ͷ�Ƚ��и���
ֱ����� 3 ������ĥĥͷ��װ 1 �ס����ĥ���� 1 �����䱸�ǿ��������֣��ƶ�ʽ�װ壬�������ӿڡ� |
1 |
�� |
11 |
���ӵ�Ԫ |
���ܣ��̶����ӹ����������ŷ����Ʊ�λ�����������Ͻ���λ���л�����ɺ���ʵѵ��
�ŷ���� 1 �����ŷ������� 1 ���������ñ���װ�������ƶ�ʽ�װ壬�������ӿڡ� |
1 |
�� |
12 |
RIFD ʶ��Ԫ |
ÿ�����乤װ���϶���װ�� RFID ��ǩ����ÿ����λ���϶���Ҫ����ʶ���������� PLC ��������ͨѶ������Ϣͨ���������紫�����������ʵʱ�ĸ�������λ����Ϣ�Ͳִ�λ����Ϣ���������ϡ���Ʒ�����Ʒ�Ŀ����Թ�������Ҫ����������
1. ģ��ṹ
(1) ���γߴ磨���������ߣ��� 250 �� 200 �� 59mm
(2) �����ʵѵ̨��λ��װ
2. ���������
(1) ͨѶ�ӿڣ� RS422 �� RS485
(2) ͨѶЭ�飺 Modbus-RTU
(3) ����Ƶ�� / �ֵ�� 13.56MHz
(4) ���÷�Χ / ���ֵ�� 140mm
(5) ������ / ���ߵ紫��ʱ / ���ֵ�� 106kbit/s
3. ���ӱ�ǩ������
(1) �������� 10
(2) �û����ڴ棺 1024bit
(3) �ߴ磺�� 24 �� 3mm
(4) ����Ƶ�ʣ� 13.56MHz
(5) �̶����ͣ�������
(6) ��Ӧ���룺 2 �� 20mm |
|
|
12 |
��̵�Ԫ |
PLC �������
HMI ��̬����
�Ӿ���̬����
���������������������ϵͳ����
������ʵ���Ұ�ȫ����ϵͳ |
1 |
�� |
13 |
HMI ������Ԫ |
���ܣ��ɴ���������ťָʾ����ɣ�������ϵͳ���п��Ƽ�ָʾ���á��˻����津���� 1 ̨����ť 4 ֻ�����䱸������װ֧�ܡ� |
1 |
�� |
14 |
PLC ���Ƶ�Ԫ |
���ܣ����װ尲װ���� PLC ����Ƶ���ȿ���ϵͳ��ɡ�
1 �� 1 ̨������ 1200 ������ܣ�
2 �����ص�Դ 1 ��
3 ������©�籣������ DZ47LE32 1 ��
4 �������Ӵ����� CJX22510 1 ��
5 ���۶��� RT18-32+3A ���� 1 ��
6 ���̵��� MY4N-J24DV+ ���� 4 ��
7 ����ɫ���߶��� 5 ��
8 ������� 1 ��
9 ����Ƶ�� 1 ��
10 �� 1-2 ���ֲ�ʽ I/O
11 ��֧�� ProfiNet ���ߣ�
12 ���ⲿ��ť����װ�� |
1 |
�� |
15 |
���õ�Ԫ |
����ѹ���� 1 ̨������������ 1 ������Ԫ������·�� |
1 |
̨ |
16 |
���� |
Բ������װ�乤�� 9 ����Բ������װ�乤�� 9 ������������ 12 �������� / ��ĥ���� 10 �� |
1 |
�� |
17 |
������ģ�� |
���ú��ղ� 1 ���������컻��ͷ 1 ������װ�ڸ���Ԫģ���Ϸ�����ٶԽӡ� |
5 |
�� |
18 |
ͨ�õ����ӿ��� |
�����ӿ�ģ�顢��������չģ�顢ģ������չģ�� |
|
|

�ߡ���������������ϵͳ
������������ʵ���Ұ�ȫ����ϵͳ
��ƽ̨�� ���ߴ��� ����Ϣ������ ���������� Ӧ�������Զ���Զ�̿��ơ��豸������״̬�����ݲ������ϴ�����ƽ̨�� ������ ϵͳ�Ĵ��в㡢������Ӧ�ò��������������������ݡ�
• ���ѹ��������ģ����������ʾ
• ���뿪�ؼ�أ�������ص����������ơ�
• ��Զ�̿�����ͣ״̬�����������ѹֵ�ġ�
• ��ʾ���������ѹֵ����ʷ����
• �ɰ������ڡ��ռ���в�ѯ��ʷ�����в�ѯ��
• �ﱨ���ź�Ϊ PLC ����ģ�����ɼ���ֵ���߿��������������趨���統ģ�������볬���趨��ѹʱ����������ͨ���������Զ���Ӧ�������������ź��ϴ�����ƽ̨��ͨ����ƽ̨�����õ��ն����ͱ����źţ�ÿ̨�豸�ɶ�Ӧ����ն��豸��
• ��ͨ���ֻ��˿���ʵ��Զ�̿��� PLC ����������� PLC ������״̬�仯��
• ������ʾ���棺������ʾ�����ѹ��ֵ�������ѹ��أ�����״̬���룬���ؿ���������Լ��ƶ����Ӷ�ά�롣
• �������ý��棺�����ֳ�����������ƽ̨��̨���ݿ������
������ ��ҵ���������߱������ ��
�� 1 ������ϵͳ֧�� ABB �� KUKA �� Fanuc �����������ɡ������ء��������ء���è��˹�ձȶ��� UR ���Ű����������ȶ��ֻ����ˣ��ṩ 50 �����ϵĸ� Ʒ�ƻ�����ģ�ͺʹ�������������⣻
�� 2 ��֧�ֶ��ָ�ʽ����ά CAD ģ�ͣ��ɵ�����չ��Ϊ step �� igs �� stl �ȸ�ʽ��
�� 3 ����ͨ������ CAD ģ�Ϳ��������˶����������������������в������� ;
�� 4 ��֧�ֹؽ��ͻ����ˡ� Delta ���ռ������ɶȲ������������ˣ��� SCARA ��ƽ��ؽ��ͻ����ˣ���ֱ������ȸ��ֽṹ�Ļ����ˣ�
�� 5 ������ͨ��ר�õ�ģ��ͳ������Զ��Ƹ��ֻ����˺��Զ������ߵ��˶����ơ��㷨֧�ְ��� 3-5 ���ͨ�û����� 3-6 ����ת��Ĵ�����������˫�ۣ� AGV С�����Ȼ����˼��������϶�Ӧ�Ĺ�װ�оߣ����ʹ�����λ��������ȸ����豸��
�� 6 ���ṩ��ҵ�����������ѧģ�飬�ܹ�ͨ������ʾ�����Ի����˵��ֶ������Լ����������Զ����У�Ҳ��ֱ���ͻ�ָ����ʵ��ʾ������
�� 7 ���ṩǿ��� API ����֧�֣�������չ���������˻������Զ���Ӧ�á��ɽ��з����Ӧ���ڳ��������ȡ�������Ӧ���ڸ��ӵĶ������ͬ���˶��ȣ�
�� 8 �������ḻ�Ĺ켣�����Ż����߰�������ײ��顢��ҵ�����˿ɴ��ԡ���̬����㡢�ᳬ�ȣ�
�� 9 ��֧�ֶ������ͬ���˶����棬�ܹ�ʵ�� 5 �������ϻ��������ⲿ���ͬ�� �˶���
�� 10 �������Զ� �������߷��湦�ܣ����������� AGV С�����������������ڵĹ���ģ�飻
�� 11 ����ʵ��ģ��Ч�����纸�ӻ�Ч����������ɫЧ�������Ч������
�� 12 ���ṩ���ӽǵĹ۲죬����ʵ���˶��ӽǾ�ͷ�٣�
�� 13 ��֧����������Ľ�ģ����棬֧���Ӿ���������룬�����еȴ������ķ��棬Ч���ӽ���ʵ��������Ч����
�� 14 �������е�����ʵ�������ʵ�����е����������Ч�������Խ�����ײ��Ⲣ�߱������˶���Ч�����߱�����������Ħ��ϵ���Ȳ������������ܸ�����Щ����ģ���������ʵ�˶�Ч�����û���������ʵ�����е����Գ������н�ģ�������˽�ģ�ĸ����ԡ�
�� 15 ���������߱�̹��ܣ�֧�� ABB �����⣬ Fanuc �������������Ʒ�ƻ����˵Ĵ��룻
�� 16 �������ɷ����˶���Ƶ�� AVI ���� Mp4 ��ʽ����������
�������������ṩ��ҵ���������߱����������Ȩ֤��ԭ�����飬���ṩ������ʮ�ŵ�������ͼ��
������ PLC ���Ʊ�̷�������
1 �������ص㣺
�� 1 �������� PLC Ϊԭ�ͣ�ʵ�ֻ���ָ�Ӧ��ָ���Լ�˳�����ָ��ķ���ģ�⡣
�� 2 ������ͨ��ʵѵҪ���˽�ʵѵĿ�ĺͿ���Ҫ��
�� 3 ��ʵѵ����������ά����ʵ���������ѧ���˽����ʵ���������Ԫ����
�� 4 ��ͨ�������⣬ѧ���ɽ����������֣��Ը����ƻ�·����ģ����ߡ�
�� 5 ��ͨ�� I/O ���䲼�ã�������Ƶ� I/O �����ַ��Դ��Ӧ�����ܲ鿴�����Ӧ��ʵ�
�� 6 ��ͨ�����ſ⣬ѡ����ȷ�ķ��ŷ����� T ��ͼ��ȷλ�ã�ʵ�ֽ��߷��档
�� 7 ����ԭ��ͼ�н���ģ��������ӵ�·��������������ȷ����ܽ�����һ���Ľ��߲�����
�� 8 ���������ʵ��ͨ�����У�ͨ���������ϵ����У��������Զ�����ʽ���ж�����ʾ��
2 ������������Ŀ
�� 1 ��˫��ϳ������
�� 2 ����ҵϴ�»�����
�� 3 ��Ƥ�������߿���
�� 4 ����������߿���
�� 5 ������������
�� 6 ��������Ȫ����
�� 7 ������е�ֿ���
�� 8 ����С����װ�ÿ���
�� 9 ��ѭ���ʵƿ���
�� 10 ��ͣ������λ����
�� 11 ��С�Ƴ�����
�� 12 ��������ݿ���
�� 13 ���綯����ͣ����
�� 14 ���綯������ת����
�� 15 ���綯��ѭ������ת����
�� 16 ���������з����ƶ�����
�� 17 �����ٵ������
�� 18 ���ǽǽ�ѹ��������
�� 19 ������ܵ�������
�� 20 ����ͨ�ƿ���
�� 21 ����ѹ��ˮϵͳ����
���ṩ PLC ���Ʊ�̷�����������Ȩ֤��ԭ�����顣
���ģ��������Ƽ���ʵѵ��������
�� 1 ��Ӧ�����ڵ������Ƽ��繤��ѵ����������Ӧ�ռ��е���רҵ�������������Ҫ�� 18 �ֵ�·���綯�������ƶ����Ƶ�·������綯����е�ƶ����Ƶ�·��ʱ��̵����Զ����Ƶ綯�� Y- ����ѹ��·���Ӵ����Զ����Ƶ綯�� Y- ����ѹ��·����������Ƶĵ綯����ѹ���Ƶ�·��������е�г̿��Ƶ�·��˫�������綯��������Ƶ�·���й��ر����ĵ綯��������ת�������Ƶ�·��ֱ���綯��������ת���Ƶ�·��ֱ���綯�����ƶ����Ƶ�·��ֱ���綯�����ٿ��Ƶ�·���괲�������Ƶ�·��ƽ��ĥ�����Ƶ�·�������������Ƶ�·������ʽ�綯����ת���Ƶ�·���綯��«���Ƶ�·���Ӵ������Ƶ�˫�ٵ綯�����ٵ�·���ܺ��ƿ��Ƶ�·��ÿ����·��ΪԪ���ṹ��ԭ��������ʵ�ʽ��ߡ�������ϰ�Ĵ�ģ�顣������������ȫ�õ糣ʶ�����õ繤���ߣ����õ������ӣ��ֹ����ӹ��յȣ��繤�DZ����������ܱ������ܱ���ǯ�͵�������ֱ�����ţ�����ȣ�������ѹ�������������첽�綯���������첽�綯�����ŷ���������������ֱ������ȣ���ѹ���������������Ӵ������̵�������ѹ��·�����۶�������������������ȣ�������·��װ������ӫ��ƣ����ؿ��Ƶơ�������ʽ���ж�ý����ʾ�����μ�����ѧ�ͽ����μ�����Ƶ�����ڴ��͵�һ����ҵʵ�����㣬��ʹ�õ��豸�빤�����̣���Ϊ����������������ʹ�õ������������龰ģ������֧�ֶ�ý�岥�ţ���������ʵ�ʵĸ���������ʹ�÷�����ע������ܹ������侳�ظ��ܵ����������ı���Ч����
�� �ṩ�������Ƽ���ʵѵ������������Ȩԭ�����顣
���壩��ѧ�μ���Դ
1 ����ҵ�����˿γ���Դ
• ��ҵ�����˵ĸ�������ҵ�����˵Ķ��塢��չ��Ӧ�á�������ɼ�������������ҵ�����˵ķ��ࣻ
• ��ҵ�����˵Ļ�еϵͳ����ҵ�����˵� 1 ��ṹ����ҵ�����˵� 2 ��ṹ����ҵ�����˵� 3 ��ṹ����ҵ�����˵� 4 ��ṹ����ҵ�����˵� 5 ��ṹ����ҵ�����˵� 6 ��ṹ����ҵ�����˵Ļ����ṹ����ҵ�����˵����߽ṹ����ҵ�����˵�����װ�úʹ�����Ԫ��
• ��ҵ�����˵��˶�ѧ�붯��ѧ����ҵ�����˵����˲������������任����
• ��ҵ�����˵Ŀ���ϵͳ����ҵ�����˿���װ�á���ҵ����������װ�á���ҵ�����˼��װ�ã�
• ��ҵ�����˵ı�̣���ҵ�����˵ı�̷�ʽ����ҵ�����˵�ʾ�̱�̡���ҵ�����˵ı�����ԡ���ҵ�����˵�����ϵͳ�ṹ�ͻ������ܡ����ù�ҵ�����˱�����ԡ���ҵ�����˵����߱�̡���ҵ�����˵����߱�̷������������ʾ����
• ��ҵ�����˵ĵ���Ӧ�ã����ӻ����˵�Ӧ�á����˻����˵�Ӧ�á��������˵�Ӧ�á�Ϳװ�����˵�Ӧ�á�װ������˵�Ӧ�ã�
• �ṩ���������߹�ҵ������Ӧ�õĸ�����Ƶ��
2 �� PLC ��̽�ѧ�μ���Դ
�� 1 �� S7-1200PLC ����֪�� S7-1200PLC ��顢 S7-1200PLC ����ԭ��������ģʽ�� S7-1200PLC �ص㡢 S7-1200PLC ��չ���ܡ� PLC Ӧ�ü����˲�������
�� 2 �� TIA ��ͼ������ʹ�ã� TIA ��ͼ������������ƽ̨�� TIA ��ͼ����������顢����ʵ����
�� 3 �����Ƶ�Ԫ�ij�����ơ�ָ���д��Ӳ��ѡ�ͺ���ơ��κ�˼������ϰ�����ݡ�ģ�����ٰ�������·�������������첽����������ǽ�ѹ����������С���������ơ�ʮ��·�ڽ�ͨ�ƵĿ��ơ��綯�������ͣ���ơ� HMI ����Һ���ϡ� G120 ��Ƶ���ĵ�����ơ�
�� 4 ��С���Զ��������ߵ����
�μ���Դ���в�Ʒ�İ��ˡ����ʹ���ּ��ܣ�����ϵͳ�����ϵ�Ԫ����е�ְ��˵�Ԫ�����������㶨λ���͵�Ԫ�ʹ��ʹ����ͷּ�Ԫ����ɡ��������Ŀ���Ҫ�����£�
1 ������Ƶ�Ҫ��ʹ��ͨ�������������̨��ť���������������ߵ��Զ����С�������ͨ���Ժ�ϵͳ���м���ʼ״̬�Ƿ����������������粻���������и�λ���ֶ���������������������ʾ��������
2 ����������������£�����������ť�������߿�ʼ��˳�����У����ϵ�Ԫ��ʼ�������������ת�̽������͵�����̨�ϣ�������� 10 ���������̨��翪��û�м����ϣ�˵����û�����ϣ���ʼ�������������ϣ���һ�Ű��˻�е�ֿ�ʼ������
3 ������̨���ϣ�һ�Ż�е�ֱ�������½���ȡ��������ȡ���������е���������ز���ת���Ҳ���λ��Ȼ���е������½��������ŵ�����������͵�Ԫ�Ĺ���̨�ϣ�һ�Ű��˻�е�ָֻ�����ʼ״̬���ȴ���һ�����У�
4 ��������������͵�Ԫ������������̨�����������ǰ���߶ȼ�ⵥԪ���м�⣻�����ͨ�����������������и߶ȼ�⣬�����Ϻ���������е����Ű��˻�е��λ�ã�
5 ��������Ű��˻�е��λ�ú��Ű��˻�е�������צ��ȡ����������̨��������ת������λ������ֱۣ�����̨�½�����צ���ɣ��������ŵ����ʹ��ϣ�ͬʱ���Ű��˻�е�ָ�λ��
6 �������ʹ���Ԫ������������ʱ�����ʹ���ʼ���������ݹ�������ɫ�����Ͻ��зּ𣻷ּ��������̨�ص�����λ�ã��ȴ���һ�����С�
�� 5 ���û��ֲ������ S7-1200 ���й�Ӳ����������ͨ�ŵ��ֲᣬ���������ڶ�ʮ���֡�
|
