JGY-PCB01 �� ��ҵ������ PCB ���β������վ
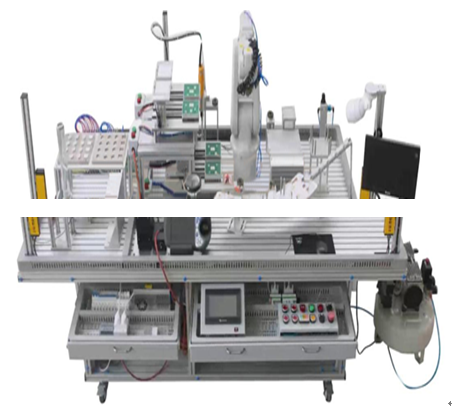
һ����ҵ������ PCB ���β������վ��ϸ��������
1. ��ҵ�����˱��壺
ABB IBR120/3 �����ɶȹ�ҵ�����˱��壻����ء� 3 kg �� ����չ�뾶�� 580mm �� �������� 6 �λ���ظ����ȣ��Q 0.01mm �� �����ȼ��� �� IP30 ��
���˶���Χ��
�� 1 �� 1 ��ݡ� 165 ��
�� 2 �� 2 ��ݡ� 110 ��
�� 3 �� 3 ��� +70 ���� -110 ��
�� 4 �� 4 ��ݡ� 160 ��
�� 5 �� 5 ��ݡ� 120 ��
�� 6 �� 6 ��ݡ� 400 ��
�����˱����������� 25kg �� ����������� 70dB(A) ��
2. ��ҵ�����˿�������
• ������ҵ�����˿��ƹ������Ĺ�ҵ�����˱������ף�
• ����Ӳ�����ദ����ϵͳ���������桢 UPS ���ݵ�Դ���� 20S ����
• ������������������Ԥװ��
• ����ʣ��� 3KVA( ��ѹ������ ) ��
• ��Դ���룺 200V/230V 50-60Hz
• �ߴ磺 710*449*442mm
• ������ 30kg
• �����ȼ��� IP20
3.FlexPendant ʾ����
• ������ 1kg
• ֧�֣���ɫ�����������ݸˣ�����ͣ��֧�ֹ����� / �����л���֧�� U �̡��Ȳ�Ρ��ָ�����֧�� USB ����������ʱ���ǵ�¼��֧��Զ�̷���
4. �컻���� 1 ��
�� 1 �����߿컻ϵͳ����ʵ�ֲ�ͬ����������Ϊ�����Զ�����л����� 6 ·�����źţ�����ء� 3kg ����� 38mm �� 5mm ������ 125g �� 20g ��
�� 2 ����ǹ���ߣ����й��߶˿컻ģ����컻ģ�����ף��ܳ� 140mm-150mm �����Ϊ���Ͻ���ʡ�
�� 3 ����צ���ߣ��ܳ� 140mm �� 2mm ���ھ� 20mm �� 2mm ���ظ����ȸ��ڡ� 0.01mm ���պϼг����� 45N �������г� 10mm �� 2mm ��
�� 4 �����̹��ߣ��ܳ� 110mm �� 2mm ���ṹΪ���Ͻ���ʣ�ӵ��ֱ�� 4mm �� 1mm ���� 1 ���� 1 �����ϣ�ֱ�� 20mm �� 2mm ���� 2 ���� 2 �����ϡ�
�� 5 ������˿���ߣ��ṹΪ���Ͻ���ʣ��ܳ� 360mm �� 2mm ��Ť�� 0.19Nm~0.78Nm ��ת�� 2200r/min-2500 r/min ֮�䡣
5. Ϳ����Ԫ 1 ��
1) 3D �켣ͼ��ߴ� 440mm �� 250mm ���� 2mm �������а뾭 50mm �� 2mm �Ĺ����棬����Ϊ̼�ֿ�������Ͻ𣬺�� 3mm �� 0.5mm ��
6. ��ⵥԪ 1 ��
�� 1 ��̨��Ϊ POM �����Ͻ𣬳ߴ� 110mm �� 110mm �� 15mm ������ 20mm ���ߡ� 5mm ���������Ͻ��Ͳ�֧�ţ��߶� 160mm �� 20mm ��
�� 2 ������ģ�����ϣ����� PVC �����Ͻ𣬳ߴ� 65mm �� 32mm �� 15mm ���� 5mm ���������� 8 ����
7. �Ӿ���ⵥԪ 1 ��
�� 1 ���Ӿ������� CCD ���ռ�⣬��Ч�������� 1600 �� 1200 ����ɫ��⣬��������� 7.0mm �� 5.4mm ���������� 120 �����ɴ洢ͼ������ 40 �ţ����������̱༭���������������̣�֧�ִ��� RS-232C ������ Ethernet ͨѶ���ṩ��������� 1 �㡢��������� 4 �㡢ͨ������� 9 ���ͨ������� 23 ��IJ���ͨ�ţ��ṩ DVI-I ��������
�� 2 ���ṩ���ι�Դ����Բֱ�� 90mm �� 5mm ����Բֱ�� 120mm �� 5mm �������ѹΪֱ�� 12V �� 24V ��
�� 3 ���Ӿ�������Ͳɼ�ͼ����Ϣͨ���� 12 Ӣ����ʾ����ʱ��ʾ�������Ӿ�������������״̬��ء�
8. װ���ⵥԪ 1 ��
�� 1 ����װ��λ����ߴ�Ϊ 410mm �� 190mm �� 180mm ���� 20mm �����ṹΪ���Ͻ���ʡ�
�� 2 ����װƽ̨��װ��˫�����Ի����ϣ����� 9mm �� 1mm �����ȡ� 300mm �����������������ھ� 16 �� 1mm ����Ч�г̡� 200mm ����ȫ�������� 140N ��
�� 3 �����֧���������������������ھ� 16mm �� 1mm ����Ч�г̡� 20mm ����װ�� LED ����壬�ߴ�Ϊ 100 �� 10mm �� 100 �� 10mm �� 1.5 �� 0.5mm �����ڼ�����������
9. ��˿���ϵ�Ԫ 1 ��
���γߴ� 360 �� 20mm �� 250 �� 10mm �� 160 �� 10mm �������ٶ� 0.3s-0.8s/ �ţ�������˿��� M2~M5 �������˿���� 20mm
10. ԭ���Ͽ� 1 ��
���㹲 4 ���������ɷֱ����ڴ������оƬ������ǰ�� PCB ��·�壬��Բ�뾶�� 500mm ��
11. ���Ӳ�Ʒ PCB ��·�� 5 ��
�� 1 �� PCB ��·�壬�ߴ� 120mm �� 120mm ���� 12mm ��
�� 2 ���ǰ壬�ߴ� 120mm �� 120mm ���� 5mm ��
12. �ٿ���� 1 ��
�� 1 ���ṩ����վ������ֹͣ��ģʽ���ƺͼ�ͣ��ť����ʵ�ֶ��豸���в������ṩ���ϼ��豸����״ָ̬ʾ�ƣ��ṩ����������õ㣬��ģ�ⲻͬ����µĹ��ϣ��ṩ�����·�źż���·�źŵĿ�Ӳ�ڡ�
�� 2 ���˻������ӿڣ���ʾ��Ϊ�� 7 Ӣ�� TFT ���ֱ��ʡ� 800 �� 480 �����ȡ� 350 ���Աȶ� 500:1 ���������� LED �������������Ϊ�� 4 �ߵ���ʽ�� Flash �洢���� 120MB �� DRAM Ϊ�� 64MB ��������Ϊ�� 32Bit RISC CPU �R 400MHz ���ṩ RS-232 �� RS-485 ���нӿڡ�
13. �ܿ�ϵͳ 1 ��
�� 1 �����ø����� PLC ʵ�ּ��ɿ��ơ�
�� 2 ���������̿�ͨ������ͷ�ɼ���¼������ 2.8mm �����ι�ǣ������ȡ� 720p ���й������ 1/3 Ӣ�硣
�� 3 ������ϵͳ���ʡ� 600W �������� 118L/min �� 8 L/min �����ѹ�� 8bar �������ޡ� 24L
14. ����̨�� 1 ̨
�� 1 �����Ͻ��ܣ��л������ţ�̼���ӽ��弰�װ壬����ͱ���ɴ���豸����Ʒ��
�� 2 ������ߴ�ݣ� 2200mm �� 1350mm �� 700mm ��
�� 3 ����װ̨��Ϊ���Ͻ� T �Ͳۣ�̨��ߴ�ݣ� 2100mm �� 1100mm ������ȡ� 20mm ��
�� 4 ���ײ���װ�п�����������̶ֺ�֧�š�
15. ������ 1 ��
�ṩ��װ�����Թ���վ���蹤��һ�ף������������� 1 ���������ǰ��� 1 �ס� 250mm ����� 1 �ѡ� 17mm/19mm ���ڰ��� 1 �ѡ� 13mm ���ڰ��� 1 �ѡ� 5.5mm ���ڰ��� 1 �ѡ���˿�� 1 �ס� 5 ���� 1 ����б��ǯ 1 �ѡ� Y �Ͷ���ǯ 1 �ѡ�����Ͷ���ǯ 1 �ѡ�����ǯ 1 �ѡ������� 1 �ѡ����ñ� 1 ���� PLC ����� 1 ��������������� 1 �������� U �� 1 �����������ر����ߡ�
16. ���߱������ 5 ����ϸ��������Ҫ��
� 1 �������������������Ľ��棬���ṩ���������ļ���֧�ַ���������ʹ�����й���ģ�飬�����ޡ����ð桱������
� 2 ����ʵ�ֶ��Ʒ�ơ�����ͺŵĹ�ҵ�����˽���ģ�͵��롢�켣�滮���˶�����Ϳ��ƴ��������ʵ�����߱�̣��ο�Ʒ�� ABB �� KUKA �����������ǿơ� Staubli ���������ء���ʱ��ȣ���
� 3 ���켣���ɻ��� CAD ���ݣ��켣���ɹ��̣���߾��ȣ�������ʵ��ģ�͡����������ֱ�������˶��켣��
�� 4 ��֧�ֶ�������˵��˶������棬�� 4 �ᡢ 6 �ᡢ 8 �ᡢ 10 ��ȣ�
�� 5 ��֧�ֱ�λ�о��趨����ץȡ��̬������Խ�һ����λ�о߶����ֱ��������״̬��
�� 6 �����ɵĹ켣�ɽ��з������������ɶԹ켣�����ע�͡�ɾ���ȣ�ʵ�ֶ����ƹ켣��ͳһ������
�� 7 ����ʵ�ֽ���̽���������в���� 3D ���棬�ϴ��ƶ��Զ����ɶ�ά�뼰���ӣ������ֻ�ɨ���ά���鿴�ö������������Ӻ�ͨ�������ֱ�Ӳ��ţ�
�� 8 ���ṩ�Զ������ͨ��ָ��⡣�Զ��������ʱ������ҵ�����е���ק��ʽ������ø�ʽ���ɸ��ݻ�����Ʒ��ѡ����Ӧ�ĺ��ô���ģ�壬�������ɴ��벢ʵʱԤ�ԡ��� ABB �� KUKA �� YASKAWA ���������ء���ʱ�
�� 9 ����������ͳ�Ʒ������ܡ���ͳ�ƻ��������е�ȫ��ʱ�䡢���ġ��˶���ƽ���ٶȡ��ܾ��롢�ܹ켣��������Ϣ�������û����������˹���Ч�ʣ�
�� 10 ��֧�ֻ�������ά����ͺ��ô������ͬ���������У���ʵʱ��ط���Ч����������ʾ��̴�����кţ����֡�ע�͡�ָ��ȣ�
�� 11 ���߱��켣�Ż����ܣ�ͨ��ͼ�λ���ʽչʾ�����˹�������������ͨ�����������û����˴��ڹ����������ڣ�������ɴ�ᳬ�����������⣻
�� 12 ��֧�ֹ켣�༭���ܣ���ͼ�λ���ʽͨ���϶��������ߣ����༭һ���켣��ָ�������ĵ㣬�ﵽ�������켣�⻬���ɵ�Ч����
�� 13 ���߱���ʱ����Ϊչʾ��ʽ֮һ�ķ��������塣��ʱ����ķ�ʽͬʱչʾ��������˺��˶��������˶�ʱ��������ȴ���ϵ��ÿ���켣���е���ֹʱ�䡢���н��ȵȣ�
�� 14 ���ڳ�����ơ������������ģʽ�У���ȫ��ͻ����ʾ��ƻ����Ļ�ͼ���ڵ�ģ�͡�
�� 15 ��֧�ֻ��������߲��ҡ�����ֱ�Ӵ��ƶ˻����˿���ѡ������� , ���뱾�ط�������ϵͳ�������߱�̣�ѡ�������֧��������ɸѡ�������Ƽ����Ʋ����Ļ����˹��û�ѡ��
�� 16 ���߱�רҵ�ĺ��ô���༭�������ô���༭��������ʾ������кţ����֡�ע�ͺ�ָ��ȹؼ����Բ�ͬ��ɫ��ʾ�������ڱ༭�������в�����ʾ��������ע�Ϳ��۵����ء�
�� 17 ��������ͼ���ܣ���ͨ����ͼ���������߱���������ⳡ���и��ӵ�ģ�ʹ������ȼ�Сģ�͵Ĵ�С���ɼ���ӿ��ͼ����ˢ��֡���ʣ�ʹ��ͼ��������Ӧ����������
�� 18 ���������ɶ����͡�����ҵ���߹���վ�����ɲ���ȫ��ְҵԺУ���ܴ����Ĺ���վ����������ģ��ѵ����
�� 19 ����ʵ���������⽻����������Ʒ����չʾ����������������Դ����ʵʱ��
�� 20 �������� 3D �������ݣ�ʹ��ƻ�������������ڻ����ˡ����ߡ����ӹ��㲿��֮��Ŀռ�λ�ù�ϵ����һ�£�ʵ�ָ߾���У��
�� 21 ��֧�ַ���ʱ��ʾ����ļӹ�Ч����
�� 22 ��ϵͳ���ŵײ��㷨�� API ����֧���û����ƣ����ο����� VR ʵѵ��Ŀ����
�� 23 ��ϵͳ���ŵײ��㷨�� API ����������չ����ʵ���������ʵʱͬ�����棬֧���������������ʵ�������ͬ���������ܣ������û����ƣ����ο�������������Ӧ����Ŀϵͳ��
17. ������ʵ���Ұ�ȫ����ϵͳ
��ƽ̨�� ���ߴ��� ����Ϣ������ ���������� Ӧ�������Զ���Զ�̿��ơ��豸������״̬�����ݲ������ϴ�����ƽ̨�� ������ ϵͳ�Ĵ��в㡢������Ӧ�ò��������������������ݡ�
• ��ѹ��������ģ����������ʾ��
• ���뿪�ؼ�أ�������ص����������ơ�
• Զ�̿�����ͣ״̬�����������ѹֵ�ġ�
• ��ʾ���������ѹֵ����ʷ����
• �ɰ������ڡ��ռ���в�ѯ��ʷ�����в�ѯ��
• �����ź�Ϊ PLC ����ģ�����ɼ���ֵ���߿��������������趨���統ģ�������볬���趨��ѹʱ����������ͨ���������Զ���Ӧ�������������ź��ϴ�����ƽ̨��ͨ����ƽ̨�����õ��ն����ͱ����źţ�ÿ̨�豸�ɶ�Ӧ����ն��豸��
• ͨ���ֻ��˿���ʵ��Զ�̿��� PLC ����������� PLC ������״̬�仯��
• ������ʾ���棺������ʾ�����ѹ��ֵ�������ѹ��أ�����״̬���룬���ؿ���������Լ��ƶ����Ӷ�ά�롣
• �������ý��棺�����ֳ�����������ƽ̨��̨���ݿ������
�� ���ṩ������ʵ���Ұ�ȫ����ϵͳ��������Ȩ֤��ԭ�����飬���ֳ���ʾ 1-3 �����Ƶ ��
18. ʵ�������ܵ�Դ����ϵͳ
ʵѵ���������ܵ�Դ����ϵͳ������·�����Ƶ�·����Ᵽ����·����ʾ��·������������·����ɣ�����ʵ��������һ����ϵͳ��
��Ҫ���ܣ�
18.1 �ϵ�ϵͳ�Բ�
�� 1 ������·�����Ƶ�·�ϵ�����·ϵͳ���������ѹ�Ĺ�ѹ��Ƿѹ����·�Ե�©�磻������ع����ļ�⣬��һ���ϴ��ڵ�Դ����Ͽ���
�� 2 ��������������Ӧ������ʾ��
�� 3 ���Թ��Ͻ�������������
18.2 ���м�Ᵽ��
�� 1 �������ѹ��Ƿѹ�����������©�磬��һ���ϳ��ֽ��Զ���բ��ʵʩ������
�� 2 ���Թ��Ͻ�������������
�� 3 ��������ֵ�ɽ����ֳ����á�
18.3 ©�繦�ܲ���
�� 1 ������©�����ť��װ�û��Զ��ṩһ��©������źţ�ʹ��������բ��
�� 2 �����½����ϵ�����Լ����״̬��������ʾ����������� .... ������������£�ʵѵ�����ܵ�Դ����ϵͳ�ָ����硣
18.4 ��ѹ����
�� 1 �������У����������ѹ��ʵѵ�����ܵ�Դ����ϵͳ����բ��
�� 2 ����Ӧ�ġ���ѹ�ࡱ����������ʾ��
�� 3 ��������������·��ѹ����ע�⡱��
18.5 ��������
�� 1 �������У������Դ����һ����ֹ�����ʵѵ�����ܵ�Դ����ϵͳ����բ��
�� 2 ����Ӧ�ġ������ࡱ����������ʾ��
�� 3 ��������������·��������ע�⡱
18.6 ©�籣��
�� 1 �������У���������һ�����©�磬ʵѵ�����ܵ�Դ����ϵͳ����բ��
�� 2 ���ԡ�©�硱����������ʾ��
�� 3 ��������������·©�磬��ע�⡱��
18.7 ��Դ���
�� 1 ���ɶԸ����ѹ������ֵ��ʾ��������ʾ����ʾ���ȡ� 5V
�� 2 ���ɶԸ������������ֵ��ʾ��������ʾ����ʾ���ȡ� 0.1A
�� 3 ����ѹ������ѹ���ã�
�����÷�Χ <300V ������ 1A;
�ڶ���ʱ�䣺 2-5S �����뵥λ 0.1S
�� 4 ��Ƿѹ������ѹ���ã�
�����÷�Χ�� >154V �����뵥λ 1V
�ڶ���ʱ�䣺 2-5S �����뵥λ 0.1S
(5) ���������������ã�
�����÷�Χ�� <20A, ���뵥λ 0.01A;
�ڶ���ʱ�䣺 0.5-2S �����뵥λ 0.1S
19. ��ҵ�����˿γ���Դ
• ��ҵ�����˵ĸ�������ҵ�����˵Ķ��塢��չ��Ӧ�á�������ɼ�������������ҵ�����˵ķ��ࣻ
• ��ҵ�����˵Ļ�еϵͳ����ҵ�����˵� 1 ��ṹ����ҵ�����˵� 2 ��ṹ����ҵ�����˵� 3 ��ṹ����ҵ�����˵� 4 ��ṹ����ҵ�����˵� 5 ��ṹ����ҵ�����˵� 6 ��ṹ����ҵ�����˵Ļ����ṹ����ҵ�����˵����߽ṹ����ҵ�����˵�����װ�úʹ�����Ԫ��
• ��ҵ�����˵��˶�ѧ�붯��ѧ����ҵ�����˵����˲������������任����
• ��ҵ�����˵Ŀ���ϵͳ����ҵ�����˿���װ�á���ҵ����������װ�á���ҵ�����˼��װ�ã�
• ��ҵ�����˵ı�̣���ҵ�����˵ı�̷�ʽ����ҵ�����˵�ʾ�̱�̡���ҵ�����˵ı�����ԡ���ҵ�����˵�����ϵͳ�ṹ�ͻ������ܡ����ù�ҵ�����˱�����ԡ���ҵ�����˵����߱�̡���ҵ�����˵����߱�̷������������ʾ����
• ��ҵ�����˵ĵ���Ӧ�ã����ӻ����˵�Ӧ�á����˻����˵�Ӧ�á��������˵�Ӧ�á�Ϳװ�����˵�Ӧ�á�װ������˵�Ӧ�ã�
• �ṩ���������߹�ҵ������Ӧ�õĸ�����Ƶ��
20.PLC ��̽�ѧ�μ���Դ
�� 1 �� S7-1200PLC ����֪�� S7-1200PLC ��顢 S7-1200PLC ����ԭ��������ģʽ�� S7-1200PLC �ص㡢 S7-1200PLC ��չ���ܡ� PLC Ӧ�ü����˲�������
�� 2 �� TIA ��ͼ������ʹ�ã� TIA ��ͼ������������ƽ̨�� TIA ��ͼ����������顢����ʵ����
�� 3 �����Ƶ�Ԫ�ij�����ơ�ָ���д��Ӳ��ѡ�ͺ���ơ��κ�˼������ϰ�����ݡ�ģ�����ٰ�������·�������������첽����������ǽ�ѹ����������С���������ơ�ʮ��·�ڽ�ͨ�ƵĿ��ơ��綯�������ͣ���ơ� HMI ����Һ���ϡ� G120 ��Ƶ���ĵ�����ơ�
�� 4 ��С���Զ��������ߵ����
�μ���Դ���в�Ʒ�İ��ˡ����ʹ���ּ��ܣ�����ϵͳ�����ϵ�Ԫ����е�ְ��˵�Ԫ�����������㶨λ���͵�Ԫ�ʹ��ʹ����ͷּ�Ԫ����ɡ��������Ŀ���Ҫ�����£�
1 ������Ƶ�Ҫ��ʹ��ͨ�������������̨��ť���������������ߵ��Զ����С�������ͨ���Ժ�ϵͳ���м���ʼ״̬�Ƿ����������������粻���������и�λ���ֶ���������������������ʾ��������
2 ����������������£�����������ť�������߿�ʼ��˳�����У����ϵ�Ԫ��ʼ�������������ת�̽������͵�����̨�ϣ�������� 10 ���������̨��翪��û�м����ϣ�˵����û�����ϣ���ʼ�������������ϣ���һ�Ű��˻�е�ֿ�ʼ������
3 ������̨���ϣ�һ�Ż�е�ֱ�������½���ȡ��������ȡ���������е���������ز���ת���Ҳ���λ��Ȼ���е������½��������ŵ�����������͵�Ԫ�Ĺ���̨�ϣ�һ�Ű��˻�е�ָֻ�����ʼ״̬���ȴ���һ�����У�
4 ��������������͵�Ԫ������������̨�����������ǰ���߶ȼ�ⵥԪ���м�⣻�����ͨ�����������������и߶ȼ�⣬�����Ϻ���������е����Ű��˻�е��λ�ã�
5 ��������Ű��˻�е��λ�ú��Ű��˻�е�������צ��ȡ����������̨��������ת������λ������ֱۣ�����̨�½�����צ���ɣ��������ŵ����ʹ��ϣ�ͬʱ���Ű��˻�е�ָ�λ��
6 �������ʹ���Ԫ������������ʱ�����ʹ���ʼ���������ݹ�������ɫ�����Ͻ��зּ𣻷ּ��������̨�ص�����λ�ã��ȴ���һ�����С�
�� 5 ���û��ֲ������ S7-1200 ���й�Ӳ����������ͨ�ŵ��ֲᣬ���������ڶ�ʮ���֡�
�μ���Դ�ṩ��ϸ�����ʵ��ͼƬ���������ܽ��ܡ�Ӳ�����ͼ�⡢����ָ�������ơ�����ԭ��ͼ������ԭ��ͼ��Ӳ����̬�ȣ�ͼ�IJ�ï��
|
