JG -RAI02 �� ��ҵ�������ۺ�ʵѵƽ̨�����������ˣ�
JG -RAI02 �� ��ҵ�������ۺ�ʵѵƽ̨ ��ר����Թ�ҵ�����������һ��ʵѵʵ���ѧϵͳ������ģ�黯�ṹ������ƣ���Ҫ�����ؽڹ�ҵ�����ˡ��Ӿ�ϵͳ�� PLC ģ�顢��������ϵͳ����ɣ��ɽ��й�ҵ��������ؼ���������ά��ά�ޡ�ʾ�̵ȷ���ר��ʵѵ��ѧ���ܹ���ɹؼ��豸�����ԺͲ������á���ҵ�������ֶ����Ƽ������������á���ҵ������ IO ͨ�ż� PLC ��Ϣ��������ҵ�����˵����˶��������˶����ơ���ҵ�����˹��� TCP �����궨����ҵ�����˹�������ϵ�����궨��������ϵ�л������ڹؼ���Ĺ켣��̡�ģ������Ӧ�ñ�̡���ҵ�������� PLC ��ͨѶ������������������Ӧ�õ�ʵѵ����

��; ��ҵ�����˲���Ҫ��

1. ��ҵ�����˱��壺
���������ɶȹ�ҵ������ϵͳ���ɻ����˱��塢�����˿�������ʾ�̵�Ԫ����������ź�ת������ץȡ������ɡ�
�� 1 �������˱����������ɶȹؽ���ɣ��̶����Ͳ�ʵѵ���ϣ����� 6 �����ɶȣ������ؽ���ҵ�����˰�װ��ʽ�������氲װ����װ����װ
�� 2 ���� 1 �Ṥ����Χ�� �R +170 �� /-170 �㣬�����ת�ٶ� �R 370 �� /s ����չ �R 198mm ������ �R 200W ��
�� 3 ���� 2 �Ṥ����Χ�� �R +110 �� /-110 �㣬�����ת�ٶ� �R 400 �� /s ����չ �R 141.25mm ������ �R 400W ��
�� 4 ���� 3 �Ṥ����Χ�� �R +40 �� /-220 �㣬�����ת�ٶ� �R 430 �� /s ����չ �R 260mm ������ �R 200W ��
�� 5 ���� 4 �Ṥ����Χ�� �R +180 �� /-180 �㣬�����ת�ٶ� �R 300 �� /s ����չ �R 25mm ������ �R 100W ��
�� 6 ���� 5 �Ṥ����Χ�� �R +125 �� /-125 �㣬�����ת�ٶ� �R 600 �� /s ����չ �R 280mm ������ �R 100W ��
�� 7 ���� 6 �Ṥ����Χ�� +360 �� /-360 �㣬�����ת�ٶ� �R 600 ����չ �R 86.5mm ������ �R 100W ��
�� 8 ������չ�� �R 600mm
�� 9 ����Ч���أ� �R 5kg
�� 10 ������������ �R 23.50KG
�� 11 �������ȼ��� �R IP65
�� 12 ���ظ���λ���ȣ� �R �� 0.05mm
����ʵѵ̨����������
�� 1 ������ƽ̨Ϊ��ʽ�ṹ����Ҫ��ܺ�������ù�ҵ���ͲĴ�����������װ���ػ��� IO ����չ�塢��ŷ���װλ�á���Ƶ����װλ�á� PLC ��װλ�ã��������߲���Ϊ����ʽ�ṹ�����ڽ��ߣ�Ԥ����չ�������豸����չ������ƽ̨Ϊ������װ������ģ��ĵ���ʽ�������˿��ʽ���ߴ磺�� 2100mm �� 1000mm �� 900mm �����ϣ����Ͻ� + �ְ壻ƽ̨���Ϊ����;����չ�� �Ʒ�ʽ����չ�����������оߣ�������������� 3kg �����ץȡ��Χ���� 15cm �� 15cm �����ץȡ���ȣ��� 1mm ������װ���ܡ�
�� 2 ������������ 7 Ӣ�磻Һ����ʾ���ֱ��ʣ��� 800 �� 480 ����̬��Ƕ��ʽ��̬���ṩ�� PLC ͨѶ�����Ķ˿��ߺ��ػ����ӵĶ˿��ߡ�
�� 3 �����ϣ��ߴ磺�� 50mm �� 30mm �� 15mm �����ϣ��������ʣ��������� 10 ����
�� 4 �� PLC �����ɡ� 16 ·����͡� 16 ·��� IO �ڣ����á� 64K �������� RAM �洢�����ø��ٴ����� 0.065 �� S/ ����ָ����ƹ�ģ���� 32 I/O �㣻���ö����� 3 �� 100kHz ��λ���ܣ��ṩ��ص����������븽��������
�� 5 ����Դ��·���������;������û�����Դ���������е�ѹ����������·������Ԫ��������ѹ������ 0.7Mpa ���������� 20L/min ������������ 70dB ��
������Ҫ���ܰ�飺
1 ���ּ���ˣ� �䱸Բ�Ρ������Ρ����ε�����ģ�壻�����˿ɾ���ɸ�����״���Ϸּ���ˣ������������Ӿ������ѡ���Ӿ������¿����ȫ�Զ��ּ𣨺���ɫ��λ�á����ꡢ�Ƕȵ�ʶ�𣩣�
2��; ��⣺�����ģ�ҵ���ϵ��Զ�����������ƣ������Զ���¼���λ�ú߶ȣ������ظ����ȸߣ��Զ�������ת�Ƕȵȹ��ܣ���ҵ�����˹������ϰ�װ���������̣�����һ�����ʹ������ò����������������ٶȿ��Խ��е��ڣ�����ʵ�ֽ�ģ�������͵����ʹ��Ͻ��ж����ͣ����д������ܹ����ģ�������Ƿ�ָ��λ�á�
3��; �˶��켣ģ�飺 TCP ��ϰ����Ҫ��Ϊ��ҵ�����˵Ļ���ѧϰ���ڣ��ܶ�ֱ̬�۵����ֳ� TCP ʾ�̵���Ҫ�Ժ�ʾ�̵ľ��ȣ��ܹ����ɸ���ʾ�̼�ˣ���ʵ�� TCP �궨��ϰ���ṩ TCP �궨���ν�ѧ�飻��ʵ�ֻ����켣�����ϰ���ṩ�����Ρ����ν�ѧ�켣����ʵ�ָ��ӹ켣�����ϰ���ṩ���߽�ѧ�켣��
4��; ��ˮ��ģ�飺��ˮ��Ӧ�ó����빤��ʵ������������ƣ��ɽ��л����˵�λʾ�̱������ԣ��ɸ���ѧϰ���ݲ�ͬ�����ò�ͬ��ѡ��ʽ���ɸ��ݹ�����ͬ���ò�ͬ�ļ�ȡ�оߡ�
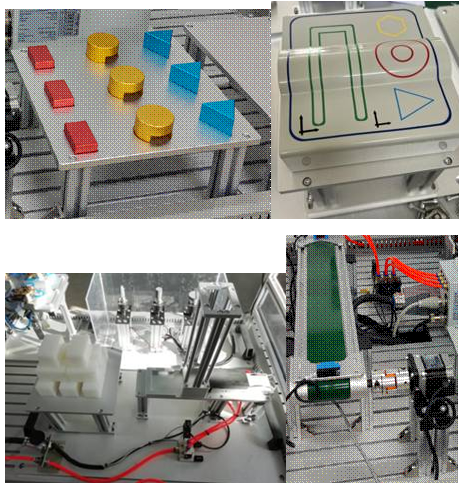
5��; ����ֿ⣺�洢�Զ�װ�乤������λ�������� 3 �� 3 �� 9 ������λ���أ��� 2Kg ����λ�ߴ磺�� 100mm �� 70mm �� 80mm �����γߴ磺�� 350mm �� 180mm �� 450mm ���������ࣺ�� 3 �� 9 ��������ģ������Զ�װ��ĸ�����Ӽ��ȡ�
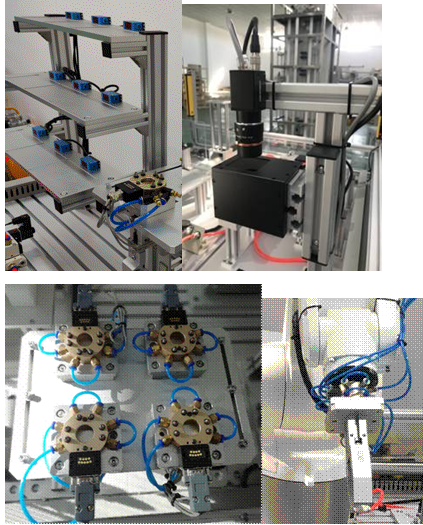
6��; �Ӿ����ܼ���ߣ���Ҫ����Ϲ�ҵ�����������ܼ����Ƕ�ȱ�ݼ��Զ���λ���Լ���ҵ�������Ӿ�ѧϰ����ʹ�ã���ҵ�����Ҫ�����£����أ��� 130W ���أ� �ֱ��ʣ��� 1280 �� 960 �� ���سߴ磺�� 3.75 �� m �� 3.75 �� m �� ���ף���ɫ�� ֧���Զ��� AOI �����ͷֱ��ʡ� f �� 16mm F1.4 �� 12 ����ҵ��ͷ��������������� ����ͬ���Դ����Դ��С�� 80mm �� 80mm �����ι�Դ��ֱ���� 70mm ������Ƕȡ� 90 �ȣ���ģ�������������ͬ���Դ����Դ�����������ⴰ�ڡ� 50mm*50mm ��������Ƶ�Դ�������Ӿ����Ӿ�����������
7��; �컻��Ԫ���� 4 �ּо���ɣ���ϻ�����ʹ�������ˡ�Ϳ�������ӡ�������;�����ÿ컻��ͷ 1 �����컻ĸͷ 4 �������˼о� 2 �ס�Ϳ���о� 1 �ס����ӹ��� 1 �ס���ŷ� 3 ���������̶��������ƶ�ʽ�װ塣
8��; ��ҵ������ĩ�˰�װ������̣���ƥ����ּоߡ�ͬʱ�����䱸 4 �ֹ�װ�оߣ��о���ר�ŵĹ��ܰ��ţ�ÿ���оߵĸ��������� 3kg ���ϡ�����ʵѵ��Ŀ��Ҫ��ɷֱ���Ϲ�ҵ������������ϼ�ȡ���켣ģ�⡢��ĥ�⡢д�ֻ�ͼ�ȹ�����
�� 9 ��������ʵ���Ұ�ȫ����ϵͳ
��ƽ̨�� ���ߴ��� ����Ϣ������ ���������� Ӧ�������Զ���Զ�̿��ơ��豸������״̬�����ݲ������ϴ�����ƽ̨�� ������ ϵͳ�Ĵ��в㡢������Ӧ�ò��������������������ݡ�
��; ��ѹ��������ģ����������ʾ��
��; ���뿪�ؼ�أ�������ص����������ơ�
��; Զ�̿�����ͣ״̬�����������ѹֵ�ġ�
��; ��ʾ���������ѹֵ����ʷ����
��; �ɰ������ڡ��ռ���в�ѯ��ʷ�����в�ѯ��
��; �����ź�Ϊ PLC ����ģ�����ɼ���ֵ���߿��������������趨���統ģ�������볬���趨��ѹʱ����������ͨ���������Զ���Ӧ�������������ź��ϴ�����ƽ̨��ͨ����ƽ̨�����õ��ն����ͱ����źţ�ÿ̨�豸�ɶ�Ӧ����ն��豸��
��; ͨ���ֻ��˿���ʵ��Զ�̿��� PLC ����������� PLC ������״̬�仯��
��; ������ʾ���棺������ʾ�����ѹ��ֵ�������ѹ��أ�����״̬���룬���ؿ���������Լ��ƶ����Ӷ�ά�롣
��; �������ý��棺�����ֳ�����������ƽ̨��̨���ݿ������
���ṩ������ʵ���Ұ�ȫ����ϵͳ��������Ȩ֤��ԭ�����飬���ֳ���ʾ 1-3 �����Ƶ ��
�� 10 ��ʵ�������ܵ�Դ����ϵͳ
ʵѵ���������ܵ�Դ����ϵͳ������·�����Ƶ�·����Ᵽ����·����ʾ��·������������·����ɣ�����ʵ��������һ����ϵͳ��Ͷ��ʱ�ֳ���ʾ���� 10.1-10.4 �����Ƶ��
��Ҫ���ܣ�
10.1 �ϵ�ϵͳ�Բ�
�� 1 ������·�����Ƶ�·�ϵ�����·ϵͳ���������ѹ�Ĺ�ѹ��Ƿѹ����·�Ե�©�磻������ع����ļ�⣬��һ���ϴ��ڵ�Դ����Ͽ���
�� 2 ��������������Ӧ������ʾ��
�� 3 ���Թ��Ͻ�������������
10.2 ���м�Ᵽ��
�� 1 �������ѹ��Ƿѹ�����������©�磬��һ���ϳ��ֽ��Զ���բ��ʵʩ������
�� 2 ���Թ��Ͻ�������������
�� 3 ��������ֵ�ɽ����ֳ����á�
10.3 ©�繦�ܲ���
�� 1 ������©�����ť��װ�û��Զ��ṩһ��©������źţ�ʹ��������բ��
�� 2 �����½����ϵ�����Լ����״̬��������ʾ����������� .... ������������£�ʵѵ�����ܵ�Դ����ϵͳ�ָ����硣
10.4 ��ѹ����
�� 1 �������У����������ѹ��ʵѵ�����ܵ�Դ����ϵͳ����բ��
�� 2 ����Ӧ�ġ���ѹ�ࡱ����������ʾ��
�� 3 ��������������·��ѹ����ע�⡱��
10.5 ��������
�� 1 �������У������Դ����һ����ֹ�����ʵѵ�����ܵ�Դ����ϵͳ����բ��
�� 2 ����Ӧ�ġ������ࡱ����������ʾ��
�� 3 ��������������·��������ע�⡱
10.6 ©�籣��
�� 1 �������У���������һ�����©�磬ʵѵ�����ܵ�Դ����ϵͳ����բ��
�� 2 ���ԡ�©�硱����������ʾ��
�� 3 ��������������·©�磬��ע�⡱��
10.7 ��Դ���
�� 1 ���ɶԸ����ѹ������ֵ��ʾ��������ʾ����ʾ���ȡ� 5V
�� 2 ���ɶԸ������������ֵ��ʾ��������ʾ����ʾ���ȡ� 0.1A
�� 3 ����ѹ������ѹ���ã�
�����÷�Χ <300V ������ 1A;
�ڶ���ʱ�䣺 2-5S �����뵥λ 0.1S
�� 4 ��Ƿѹ������ѹ���ã�
�����÷�Χ�� >154V �����뵥λ 1V
�ڶ���ʱ�䣺 2-5S �����뵥λ 0.1S
(5) ���������������ã�
�����÷�Χ�� <20A, ���뵥λ 0.01A;
�ڶ���ʱ�䣺 0.5-2S �����뵥λ 0.1S
�ġ�ʵѵƽ̨����ɵ�ʵѵ��Ŀ
�� 1 ����ҵ�������ֳ������ʵѵ����
�� 2 �� PLC �빤ҵ�����˵�ͨѶ����ʵѵ
�� 3 �� PLC �Թ�ҵ�����˵ĵ������ɿ���Ӧ��
�� 4 ����ҵ������ģ��켣ʵѵ
�� 5 ����ҵ������ͼ��ʶ��ʵѵ
�� 6 ����ҵ�����˰��������յ�Ӧ��
�� 7 ����ҵ������ƽ�������������溸�ӹ��յ�ʵѵ
�� 8 ����ҵ�����˸���װ�������װʵѵ
�� 9 ����ҵ�����˴�ĥ��յ�ʵѵ
�� 10 ����ҵ�����˶���;�컻װ�õ������л���ƥ��ʵѵ
�� 11 �� PLC ��������ʵѵ����Ӳ���ṹ������ָ����ߡ�������صȣ�
�� 12 ���������ı����Ӧ��
�� 13 ����������Ԫ���İ�װ�����
�� 14 ��������ĩ�˼оߵĽṹ�����֪��
�� 15 �������Ӿ�����Լ��빤ҵ�����ˡ� PLC ��Э����������
�� 16 �� PLC �����ŷ��������С�ͱ�λ��ʵѵ
�塢��ѧ������Դ��
�� ��һ�� ���������������������ϵͳ���� ��
�� 1 ������ϵͳ֧�� ABB �� KUKA �� Fanuc �����������ɡ������ء��������ء���è��˹�ձȶ��� UR ���Ű����������ȶ��ֻ����ˣ��ṩ 50 �����ϵĸ�Ʒ�ƻ�����ģ�ͺʹ�������������⣻
�� 2 ��֧�ֶ��ָ�ʽ����ά CAD ģ�ͣ��ɵ�����չ��Ϊ step �� igs �� stl �ȸ�ʽ��
�� 3 ����ͨ������ CAD ģ�Ϳ��������˶����������������������в������� ;
�� 4 ��֧�ֹؽ��ͻ����ˡ� Delta ���ռ������ɶȲ������������ˣ��� SCARA ��ƽ��ؽ��ͻ����ˣ���ֱ������ȸ��ֽṹ�Ļ����ˣ�
�� 5 ������ͨ��ר�õ�ģ��ͳ������Զ��Ƹ��ֻ����˺��Զ������ߵ��˶����ơ��㷨֧�ְ��� 3-5 ���ͨ�û����� 3-6 ����ת��Ĵ�����������˫�ۣ� AGV С�����Ȼ����˼��������϶�Ӧ�Ĺ�װ�оߣ����ʹ�����λ��������ȸ����豸��
�� 6 ���ṩ��ҵ�����������ѧģ�飬�ܹ�ͨ������ʾ�����Ի����˵��ֶ������Լ����������Զ����У�Ҳ��ֱ���ͻ�ָ����ʵ��ʾ������
�� 7 ���ṩǿ��� API ����֧�֣�������չ���������˻������Զ���Ӧ�á��ɽ��з����Ӧ���ڳ��������ȡ�������Ӧ���ڸ��ӵĶ������ͬ���˶��ȣ�
�� 8 �������ḻ�Ĺ켣�����Ż����߰�������ײ��顢��ҵ�����˿ɴ��ԡ���̬����㡢�ᳬ�ȣ�
�� 9 ��֧�ֶ������ͬ���˶����棬�ܹ�ʵ�� 5 �������ϻ��������ⲿ���ͬ�� �˶���
�� 10 �������Զ��������߷��湦�ܣ����������� AGV С�����������������ڵĹ���ģ�飻
�� 11 ����ʵ��ģ��Ч�����纸�ӻ�Ч����������ɫЧ�������Ч������
�� 12 ���ṩ���ӽǵĹ۲죬����ʵ���˶��ӽǾ�ͷ�٣�
�� 13 ��֧����������Ľ�ģ����棬֧���Ӿ���������룬�����еȴ������ķ��棬Ч���ӽ���ʵ��������Ч����
�� 14 �������е�����ʵ�������ʵ�����е����������Ч�������Խ�����ײ��Ⲣ�߱������˶���Ч�����߱�����������Ħ��ϵ���Ȳ������������ܸ�����Щ����ģ���������ʵ�˶�Ч�����û���������ʵ�����е����Գ������н�ģ�������˽�ģ�ĸ����ԡ�
�� 15 ���������߱�̹��ܣ�֧�� ABB �����⣬ Fanuc �������������Ʒ�ƻ����˵Ĵ��룻
�� 16 �������ɷ����˶���Ƶ�� AVI ���� Mp4 ��ʽ����������
��������ѧ�μ���Դ
�� 1 ����ҵ�����˿γ���Դ
��; ��ҵ�����˵ĸ�������ҵ�����˵Ķ��塢��չ��Ӧ�á�������ɼ�������������ҵ�����˵ķ��ࣻ
��; ��ҵ�����˵Ļ�еϵͳ����ҵ�����˵� 1 ��ṹ����ҵ�����˵� 2 ��ṹ����ҵ�����˵� 3 ��ṹ����ҵ�����˵� 4 ��ṹ����ҵ�����˵� 5 ��ṹ����ҵ�����˵� 6 ��ṹ����ҵ�����˵Ļ����ṹ����ҵ�����˵����߽ṹ����ҵ�����˵�����װ�úʹ�����Ԫ��
��; ��ҵ�����˵��˶�ѧ�붯��ѧ����ҵ�����˵����˲������������任����
��; ��ҵ�����˵Ŀ���ϵͳ����ҵ�����˿���װ�á���ҵ����������װ�á���ҵ�����˼��װ�ã�
��; ��ҵ�����˵ı�̣���ҵ�����˵ı�̷�ʽ����ҵ�����˵�ʾ�̱�̡���ҵ�����˵ı�����ԡ���ҵ�����˵�����ϵͳ�ṹ�ͻ������ܡ����ù�ҵ�����˱�����ԡ���ҵ�����˵����߱�̡���ҵ�����˵����߱�̷������������ʾ����
��; ��ҵ�����˵ĵ���Ӧ�ã����ӻ����˵�Ӧ�á����˻����˵�Ӧ�á��������˵�Ӧ�á�Ϳװ�����˵�Ӧ�á�װ������˵�Ӧ�ã�
��; �ṩ���������߹�ҵ������Ӧ�õĸ�����Ƶ��
�� 2 �� PLC ��̽�ѧ�μ���Դ
�� 1 �� S7-1200PLC ����֪�� S7-1200PLC ��顢 S7-1200PLC ����ԭ��������ģʽ�� S7-1200PLC �ص㡢 S7-1200PLC ��չ���ܡ� PLC Ӧ�ü����˲�������
�� 2 �� TIA ��ͼ������ʹ�ã� TIA ��ͼ������������ƽ̨�� TIA ��ͼ����������顢����ʵ����
�� 3 �����Ƶ�Ԫ�ij�����ơ�ָ���д��Ӳ��ѡ�ͺ���ơ��κ�˼������ϰ�����ݡ�ģ�����ٰ�������·�������������첽����������ǽ�ѹ����������С���������ơ�ʮ��·�ڽ�ͨ�ƵĿ��ơ��綯�������ͣ���ơ� HMI ����Һ���ϡ� G120 ��Ƶ���ĵ�����ơ�
�� 4 ��С���Զ��������ߵ����
�μ���Դ���в�Ʒ�İ��ˡ����ʹ���ּ��ܣ�����ϵͳ�����ϵ�Ԫ����е�ְ��˵�Ԫ�����������㶨λ���͵�Ԫ�ʹ��ʹ����ͷּ�Ԫ����ɡ��������Ŀ���Ҫ�����£�
1 ������Ƶ�Ҫ��ʹ��ͨ�������������̨��ť���������������ߵ��Զ����С�������ͨ���Ժ�ϵͳ���м���ʼ״̬�Ƿ����������������粻���������и�λ���ֶ���������������������ʾ��������
2 ����������������£�����������ť�������߿�ʼ��˳�����У����ϵ�Ԫ��ʼ�������������ת�̽������͵�����̨�ϣ�������� 10 ���������̨��翪��û�м����ϣ�˵����û�����ϣ���ʼ�������������ϣ���һ�Ű��˻�е�ֿ�ʼ������
3 ������̨���ϣ�һ�Ż�е�ֱ�������½���ȡ��������ȡ���������е���������ز���ת���Ҳ���λ��Ȼ���е������½��������ŵ�����������͵�Ԫ�Ĺ���̨�ϣ�һ�Ű��˻�е�ָֻ�����ʼ״̬���ȴ���һ�����У�
4 ��������������͵�Ԫ������������̨�����������ǰ���߶ȼ�ⵥԪ���м�⣻�����ͨ�����������������и߶ȼ�⣬�����Ϻ���������е����Ű��˻�е��λ�ã�
5 ��������Ű��˻�е��λ�ú��Ű��˻�е�������צ��ȡ����������̨��������ת������λ������ֱۣ�����̨�½�����צ���ɣ��������ŵ����ʹ��ϣ�ͬʱ���Ű��˻�е�ָ�λ��
6 �������ʹ���Ԫ������������ʱ�����ʹ���ʼ���������ݹ�������ɫ�����Ͻ��зּ𣻷ּ��������̨�ص�����λ�ã��ȴ���һ�����С�
�� 5 ���û��ֲ������ S7-1200 ���й�Ӳ����������ͨ�ŵ��ֲᣬ���������ڶ�ʮ���֡�
|
