JGR-RZ02 型 工业机器人认知与编程实训系统
一、设备概述
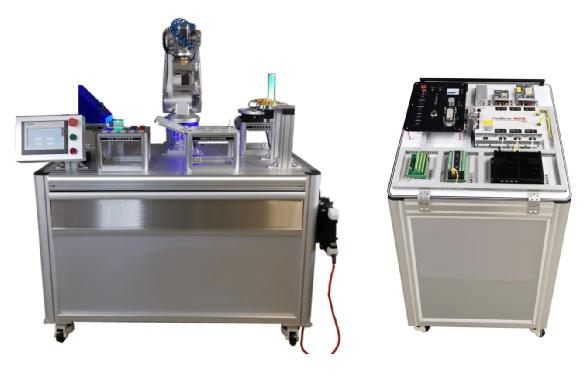
该工作站由一套透明工业六轴机器人、西门子 PLC 与触摸屏为主的电气模块、机器人功能实训模块、触摸显示屏、高档铝合金桌体组成,设备全部采用工业标准电气设备进行安装生产且为当今自动化主流设备,该设备能完成由现实工业生产转变为可供学生学习的高仿真度的现场工作环境,培养学生的认知能力及学习能力,使学生一进入该领域即可快速适应现实中的生产物流环节,提高学生的竞争力。
本实训装置 / 设备适合本科院校、高职院校、职业学校的工业机器人技术应用、机电设备安装与维修、机电技术应用、电气运行与控制、电气技术应用、电子电器应用与维修等专业和《可编程控制器技术》、《电气及 PLC 控制技术》、《 PLC 及其应用》、《工业机器人技术》等课程的实训教学。
二、技术参数
1 、输入电源: AC 220V ± 10% 50HZ
2 、输入功率:≤ 3kw
3 、工作环境: 1 ) 温度: -10 ℃~ +40 ℃
2 ) 相对湿度:≤ 90% ( +20 ℃)
3 )海拔高度:≤ 4000m
4 )空气清洁,无腐蚀性及爆炸性气体,无导电及能破坏绝缘的尘埃
4 、设备重量 : ≈ 260kg
5 、本质安全:具有接地保护、漏电保护功能,安全性符合相关的国家标准。采用高绝缘的安全型插座及带绝缘护套的高强度安全型实验导线。
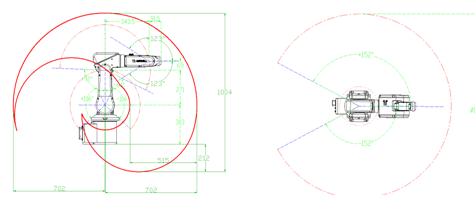
6 、机器人工作空间
三、机器人本体全透明
机器人本体结构件采用高强度透明材料加工而成,拆装时内外结构清晰可见,直观展示机器人内部传动结构及内部走线,透明结构件连接螺纹部分采用特殊工艺做加强处理,可反复拆装,耐用性良好。形式新颖,学习效果尤其良好。

仅供参考、以实物为准
四、展开式工业机器人控制台
控制系统展示台由控制系统面板、展示桌体、示教器组成,面板可旋转立起,由气动推杆撑起,方便学生对面板进行操作。
展开式工业机器人控制台是控制柜展开的形式。设备内部装有脚踏板可控制面板抬起角度,面板正上方有一根长横杆用以把控抬起的位置。
控制柜面板由接口面板、制动电阻、 12V 开关电源、 24V 开关电源、伺服驱动器、 IO 转接板、 IO 信号板和总线型工业机器人运动控制器组成,各模块间采用线槽形式走线。运动控制器具有 RS485 、 USB 、 Ethernet 、 VGA 、数字量模拟量等通讯接口,能满足教学、科研场景下与不同外部模块的通讯要求(支持视觉模块应用)。
五、实训模块介绍
运动指令・坐标系训练模块
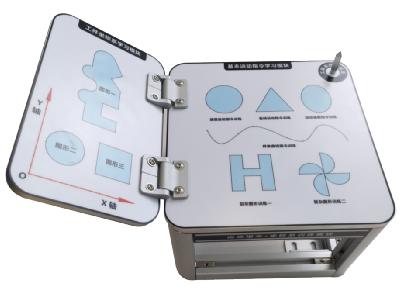
图 1 运动指令・坐标系训练模块
该模块采用激光描绘图案,完成圆弧、直线、 B 样条曲线等基本运动指令的训练,同时可借助能任意调整角度的训练板进行工件坐标系标定训练,此外,模块还设置了专用的工具标定尖供使用者完成工具坐标系的标定训练。
末端快换夹具模块

图 2 末端快换夹具模块
该模块设置了两组末端快换夹具,可供使用者练习精密的工业机器人快换夹具更换操作,学习末端快换夹具的机械、电路及气路连接原理。
自落重力供料模块

图 3 自落重力供料模块
该模块设置了 4 条重力自落滑道,可实现方形、矩形、圆形等物料块的自动供料,并设置了缺料指示灯,功能稳定、外形美观。
搬运・码垛训练模块

图 4 搬运・码垛训练模块
该模块设置了物料码垛区及搬运固定位置放置区,使用者在码垛区可进行不同垛型的码垛训练,可进行方形、矩形、圆形物料的固定位置搬运训练。
颜色识别模块

图 5 颜色识别模块
该模块采用高精度颜色传感器,可对待检物料的颜色进行识别,模块自带的指示灯可同时显示物块相应物块的颜色。
旋转料仓训练模块

图 6 旋转料仓训练模块
该模块共设置 12 个圆形物料放置槽,每个槽底设置 LED 指示灯,圆盘旋转有步进电机驱动,使用者可借助这个模块学习步进电机使用、 PLC 系统与机器人系统协同工作等内容。
在工作站中,可通过对以上不同功能实训模块的组合使用,完成多个复杂的工业机器人实训任务,比较典型的有工业机器人轨迹激光描绘任务,工业机器人物料码垛任务、工业机器人物料搬运任务,及工业机器人多色物块分拣任务等,使用者也可自由组合模块设置机器人实训任务。
五、配套软件及管理系统
(一)云智能实验室安全管理系统
本平台将 无线传输 、信息处理等 物联网技术 应用用于自动化远程控制。设备端运行状态、数据参数等上传至云平台。 物联网 系统的传感层、传输层和应用层关联掌握数据与分析数据。
、; ★电压、电流等模拟量数据显示
、; 输入开关监控,输出开关等数字量控制。
、; ★远程控制启停状态,给定输出电压值的。
、; 显示输入输出电压值的历史数据
、; 可按照日期、日间进行查询历史数进行查询。
、; ★报警信号为 PLC 主机模拟量采集数值或者开关量可以自由设定,如当模拟量输入超过设定电压时产生报警,通过物联网自动化应用软件将报警信号上传到云平台,通过云平台向设置的终端推送报警信号,每台设备可对应多个终端设备。
、; ★通过手机端可以实现远程控制 PLC 的输出及监视 PLC 的输入状态变化。
、; 数据显示画面:画面显示输入电压数值,输出电压监控,开关状态输入,开关控制输出,以及云端连接二维码。
、; 联网设置界面:设置现场数据连接云平台后台数据库管理。
(二) 智能制造生产线虚拟仿真系统软件 :
( 1 )仿真系统支持 ABB 、 KUKA , Fanuc 、安川、新松、埃夫特、广州数控、熊猫、斯陶比尔、 UR (优傲)、傲博等多种机器人,提供 50 种以上的各 品牌机器人模型和大量生产线组件库;
( 2 )支持多种格式的三维 CAD 模型,可导入扩展名为 step 、 igs 、 stl 等格式;
( 3 )可通过导入 CAD 模型快速生成运动组件,并对组件特征树进行操作和修改 ;
( 4 )支持关节型机器人、 Delta (空间三自由度并联机构机器人)、 SCARA (平面关节型机器人)、直角坐标等各种结构的机器人;
( 5 )允许通过专用的模板和程序语言定制各种机器人和自动化工具的运动控制。算法支持包含 3-5 轴的通用机床、 3-6 个旋转轴的串联,并联,双臂, AGV 小车,等机器人及生产线上对应的工装夹具,传送带,变位机,导轨等辅助设备;
( 6 )提供工业机器人虚拟教学模块,能够通过虚拟示教器对机器人的手动操作以及程序代码的自动运行,也能直连客户指定的实际示教器;
( 7 )提供强大的 API 功能支持,允许开展大量机器人机构的自动化应用。可进行仿真和应用于程序机器人取放物体和应用于复杂的多机器人同步运动等;
( 8 )包含丰富的轨迹调整优化工具包,如碰撞检查、工业机器人可达性、姿态奇异点、轴超限等;
( 9 )支持多机器人同步运动仿真,能够实现 5 个及以上机器人与外部轴的同步 运动;
( 10 )具有自动 化生产线仿真功能,包含码垛机、 AGV 小车、串联机器人在内的功能模块;
( 11 )真实的模拟效果(如焊接火花效果、喷漆上色效果、雕刻效果);
( 12 )提供多视角的观察,并可实现运动视角镜头追踪;
( 13 )支持虚拟传感器的建模与仿真,支持视觉,激光距离,力传感等传感器的仿真,效果接近真实传感器的效果;
( 14 )场景中的物理实体具有真实世界中的物体的物理效果,可以进行碰撞检测并具备刚体运动的效果,具备设置重力,摩擦系数等参数能力,并能根据这些参数模拟物体的真实运动效果,用户可以按照真实世界中的逻辑对场景进行建模,减少了建模的复杂性。
( 15 )具有离线编程功能,支持 ABB ,三菱, Fanuc ,安川,川崎等品牌机器人的代码;
( 16 )可生成仿真运动视频( AVI 或者 Mp4 格式)并导出。
(三) PLC 控制编程仿真软件
1 、软件特点:
( 1 )软件以 PLC 为原型,实现基本指令、应用指令以及顺序控制指令的仿真模拟。
( 2 )软件通过实训要求,了解实训目的和控制要求。
( 3 )实训器件采用三维仿真实物组件,让学生了解控制实验中所需的元件。
( 4 )通过器件库,学生可进行器件布局,对各控制回路进行模拟接线。
( 5 )通过 I/O 分配布置,将鼠标移到 I/O 分配地址资源相应部分能查看到相对应的实物。
( 6 )通过符号库,选择正确的符号放置有 T 型图正确位置,实现接线仿真。
( 7 )在原理图中进行模拟仿真连接电路,按步骤连接正确后才能进行下一条的接线操作。
( 8 )接线完成实现通电运行,通过鼠标进行上电运行,软件会以动画形式进行动作演示。
2 、软件仿真项目
( 1 )双面铣床控制
( 2 )工业洗衣机控制
( 3 )皮带运输线控制
( 4 )电镀生产线控制
( 5 )运料小车控制
( 6 )音乐喷泉控制
( 7 )简易机械手控制
( 8 )大小球传送装置控制
( 9 )循环彩灯控制
( 10 )停车场车位控制
( 11 )小推车控制
( 12 )三层电梯控制
( 13 )电动机启停控制
( 14 )电动机正反转控制
( 15 )电动机循环正反转控制
( 16 )可逆运行反接制动控制
( 17 )三速电机控制
( 18 )星角降压启动控制
( 19 )数码管点亮控制
( 20 )交通灯控制
( 21 )恒压供水系统控制
(四)电气控制技能实训仿真软件
( 1 )应适用于电气控制及电工培训,仿真软件应收集有电拖专业里最基础、最重要的 18 种电路,电动机反接制动控制电路、三相电动机机械制动控制电路、时间继电器自动控制电动机 Y- Δ降压起动电路、接触器自动控制电动机 Y- Δ降压起动电路、自耦补偿控制的电动机降压起动控制电路、生产机械行程控制电路、双重联锁电动机可逆控制电路、有过载保护的电动机单向运转电气控制电路、直流电动机的正反转控制电路、直流电动机的制动控制电路、直流电动机调速控制电路、钻床电气控制电路、平面磨床控制电路、车床电气控制电路、绕线式电动机运转控制电路、电动葫芦控制电路、接触器控制的双速电动机调速电路、能耗制控制电路。每种线路分为元件结构、原理分析、实际接线、课堂练习四大模块。软件还包括安全用电常识,常用电工工具,常用导线连接,手工焊接工艺等;电工仪表:包括万能表,电能表,钳型电流表,直流电桥,配电板等;电机与变压器:包括三相异步电动机,单机异步电动机,伺服电机,步进电机,直流电机等;低压电器;包括交流接触器:继电器,低压断路器,熔断器,起动器,主令电器等;照明电路安装:包括荧光灯,两地控制灯。软件形式上有多媒体演示动画课件和自学型交互课件,视频部分在大型的一流企业实景拍摄,所使用的设备与工艺流程,皆为生产车间现在正在使用的生产技术。情景模拟软件支持多媒体播放,让你切身实际的感受仪器的使用方法、注意事项,能够身临其境地感受到操作仪器的逼真效果。
(五)教学课件资源
1 、工业机器人课程资源
、; 工业机器人的概述:工业机器人的定义、发展与应用、基本组成及技术参数、工业机器人的分类;
、; 工业机器人的机械系统:工业机器人的 1 轴结构、工业机器人的 2 轴结构、工业机器人的 3 轴结构、工业机器人的 4 轴结构、工业机器人的 5 轴结构、工业机器人的 6 轴结构、工业机器人的机身结构、工业机器人的行走结构、工业机器人的驱动装置和传动单元;
、; 工业机器人的运动学与动力学:工业机器人的连杆参数和齐次坐标变换矩阵。
、; 工业机器人的控制系统:工业机器人控制装置、工业机器人驱动装置、工业机器人检测装置;
、; 工业机器人的编程:工业机器人的编程方式、工业机器人的示教编程、工业机器人的编程语言、工业机器人的语言系统结构和基本功能、常用工业机器人编程语言、工业机器人的离线编程、工业机器人的离线编程仿真软件及编程示例;
、; 工业机器人的典型应用:焊接机器人的应用、搬运机器人的应用、码垛机器人的应用、涂装机器人的应用、装配机器人的应用;
、; 提供汽车生产线工业机器人应用的高清视频。
2 、 PLC 编程教学课件资源
( 1 ) S7-1200PLC 的认知: S7-1200PLC 简介、 S7-1200PLC 工作原理及运行模式、 S7-1200PLC 特点、 S7-1200PLC 扩展功能、 PLC 应用技术人才培养;
( 2 ) TIA 博图软件的使用: TIA 博图集成软件开发平台、 TIA 博图集成软件简介、入门实例;
( 3 )控制单元的程序设计、指令编写、硬件选型和设计、课后思考与练习等内容。模块至少包括:八路抢答器、三相异步电机的星三角降压启动、运料小车往返控制、十字路口交通灯的控制、电动机组的启停控制、 HMI 控制液体混合、 G120 变频器的电机控制。
( 4 )小型自动化生产线的设计
课件资源具有产品的搬运、检测和传输分拣功能,整个系统由送料单元、机械手搬运单元、步进电机多点定位输送单元和传送带输送分拣单元等组成。具体的项目设计要求如下:
1 )本设计的要求使用通过触摸屏与控制台按钮操作,控制生产线的自动运行。生产线通电以后,系统自行检测初始状态是否满足运行条件,如不满足则自行复位或手动调整,若满足则触摸屏显示准备就绪;
2 )在准备就绪的情况下,按下启动按钮,生产线开始按顺序运行,供料单元开始工作,电机驱动转盘将工件送到物料台上;电机运行 10 秒后,若物料台光电开关没有检测到物料,说明已没有物料,开始报警;若检测到物料,则一号搬运机械手开始动作;
3 )物料台有料,一号机械手臂伸出并下降夹取工件,夹取到工件后机械手上升缩回并旋转到右侧限位;然后机械手伸出下降将工件放到步进电机输送单元的供料台上,一号搬运机械手恢复到初始状态,等待下一次运行;
4 )当步进电机输送单元传感器检测到供料台工件后,步进电机前往高度检测单元进行检测;到达后通过超声波传感器进行高度检测,检测完毕后;步进电机运行到二号搬运机械手位置;
5 )到达二号搬运机械手位置后;二号搬运机械手伸出、爪夹取工件,机架台上升,旋转到右限位,伸出手臂,机架台下降,手爪放松,将工件放到传送带上,同时二号搬运机械手复位;
6 )当传送带单元传感器检测到工件时,传送带开始工作,根据工件的颜色、材料进行分拣;分拣结束后,供料台回到供料位置,等待下一次运行。
( 5 )用户手册:包括与 S7-1200 、有关硬件、软件和通信的手册,数量不少于二十多种。
★课件资源提供详细的配件实物图片及参数功能介绍、硬件组成图解、程序指令、程序设计、气动原理图、电气原理图、硬件组态等,图文并茂。
六、实训项目
1 、硬件的安装与调试
( 1 )工业机器人底座的安装与调试技术
( 2 )工业机器人安装与调试技术
( 3 )工业机器人自动换夹具安装与调试技术
( 4 )机器人实训模块的安装与调试
2 、电气安装与调试
( 1 )工业机器人本体与控制器之间的电气连接与调试技术
( 2 )工业机器控制器和 PLC 之间电气连接与调试技术
( 3 )工业机器人夹具电气连接与调试技术
3 、编程调试和应用
( 1 )工业机器人通过示教器对工业机器人的运作过程调试
( 2 )通过计算机软件对工业机器人的运作过程调试
( 3 )机器人控制数据库的建立和应用
( 4 )工业机器人搬运程序的编写与调试
( 5 )工业机器人轨迹程序的编写与调试
( 6 )工业机器人码垛程序的编写与调试
( 7 )工业机器人分拣程序的编写与调试
( 8 )工业机器人工具、工件坐标系的标定
( 9 )可编程控制器程序的编写和设计
4 、设备的维护和保养
( 1 )能够按照机器人操作规程对机器人进行安全检查
( 2 )根据系统的异常,机械故障进行简单的维修和保养
( 3 )工业机器人的日、周、月检查与维护
六、主要零件配置清单
序号 |
名称 |
主要技术参数 |
数量 |
单位 |
1 |
六轴透明机器人 |
轴数 :6
有效载荷 :4Kg
重复定位精度:± 0.05mm
安装方式:任意角度
本体重量 :27Kg
最大运动半径 :702mm
能耗: 1.2KW
运动范围:
J1 回转: +152 °―― -152 °
J2 回转: +106 °―― -106 °
J3 回转: +64 °―― -92 °
J4 回转: +135 °―― -135 °
J5 回转: +152 °―― -152 °
J6 回转: +400 °―― -400 °
电源电压: AC 220V 50/60HZ |
1 |
套 |
2 |
工业机器人实训桌 |
采用高档铝合金搭建,用于摆放工业机器人本体与其他模块,安装电器元件等功能 |
1 |
台 |
3 |
运动指令・坐标系训练模块 |
可调节角度面板,模块表面有训练用图案及标定针 |
1 |
套 |
4 |
快换夹具模块 |
由两个快换夹具与支架组成 |
1 |
套 |
5 |
搬运・码垛训练模块 |
该模块设置了物料码垛区及搬运固定位置放置区,使用者在码垛区可进行不同垛型的码垛训练,可进行方形、矩形、圆形物料的固定位置搬运训练。 |
1 |
套 |
6 |
重力自落供料模块 |
该模块设置了 4 条重力自落滑道,可实现方形、矩形、圆形等物料块的自动供料,并设置了缺料指示灯,功能稳定、外形美观。 |
1 |
套 |
7 |
颜色识别模块 |
可由传感器识别物体颜色 |
1 |
套 |
8 |
旋转料仓训练模块 |
该模块共设置 12 个圆形物料放置槽,每个槽底设置 LED 指示灯,圆盘旋转有步进电机驱动 |
1 |
套 |
9 |
可编程控制器 |
型号:西门子 S7-200Smart 6ES7 288-1ST40-0AA0 晶体管输出 24vDC 供电 24 输入 16 输出 |
1 |
只 |
10 |
人机界面 |
TPC7022EX |
1 |
只 |
11 |
空气压缩机 |
OUTSTANDING 550W 30L 0.7MPa 17KG
尺寸: 55.5*25.5*51cm |
1 |
台 |
12 |
展开式工业机器人控制台 |
供电电源: 220V AC\ 重量: 80KG\ 尺寸 80*80*90CM |
1 |
套 |
|
